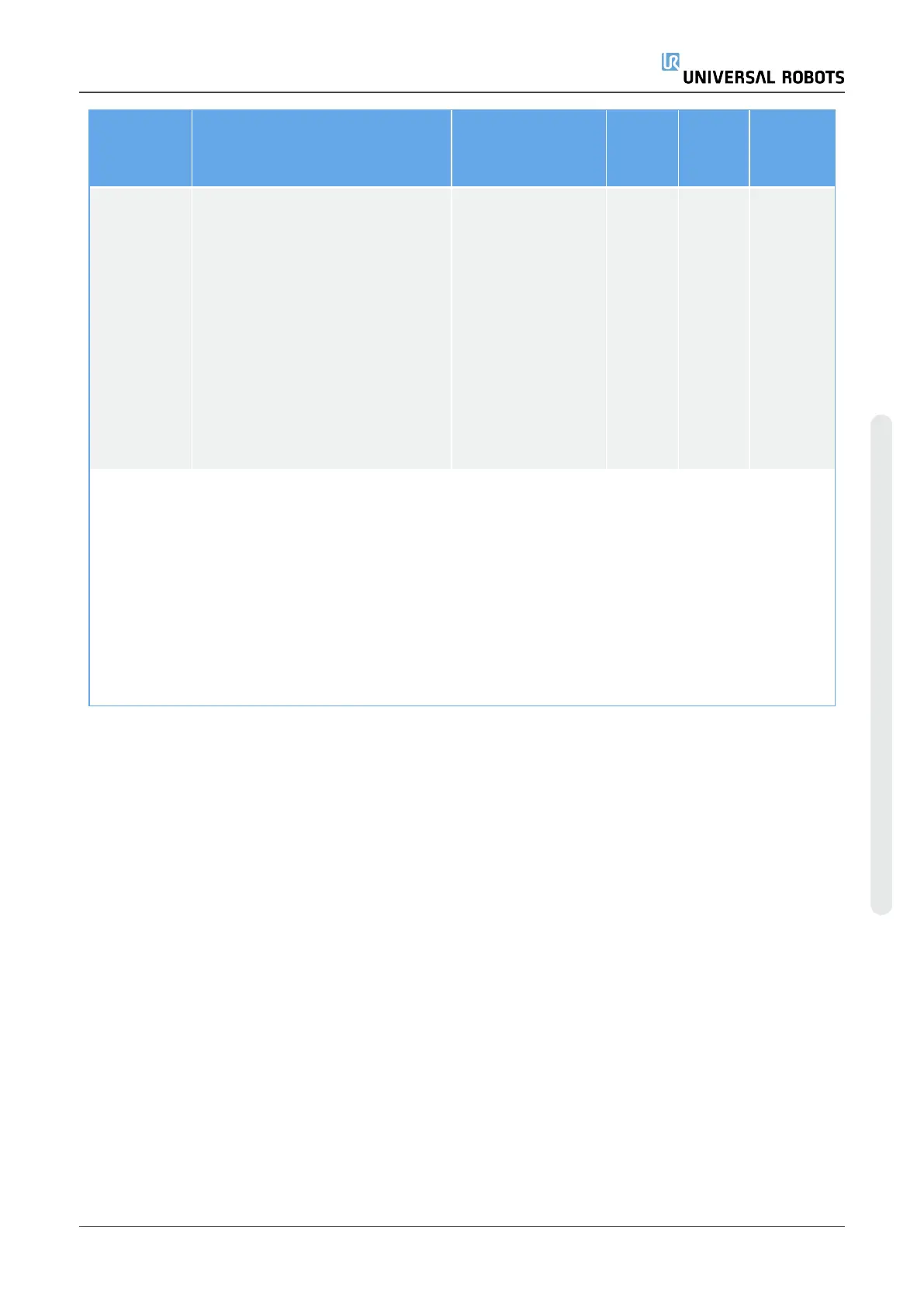
SF# and
Safety
Function
Description What happens? Tole-
rance
PFHd Affects
SF4
Joint Speed
Limit
Sets an upper limit for the joint
speed. Each joint can have its
own limit. This safety function
has the most influence on energy
transfer upon contact (clamping
or transient). Directly limits the
set of allowed joint speeds which
the joints are allowed to perform.
It is set in the safety setup part
of the User Interface. Used to
limit fast joint movements, e.g.
risks related to singularities.
Will not allow
motion to exceed
any limit settings.
Speed could be
reduced so motion
will not exceed any
limit. A protective
stop will be
initiated to prevent
exceeding any
limit.
1.15 °/s 1.20E-
07
Joint
(each)
Joint
Torque
Limit
Exceeding the internal joint
torque limit (each joint) results in
a Cat 0 stop3. This is shown as
SF #5 in the Generation 3 (CB3)
UR robots. This is not accessible
to the user; it is a factory setting.
It is NOT shown as a safety
function because there are no
user settings and no user
configuration possibilities.
- - - -
User Manual 87 UR5e
16.Safety Functions Tables
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












