WP_I
WP_1
WP_2
WP_F_1
WP_F_2
*
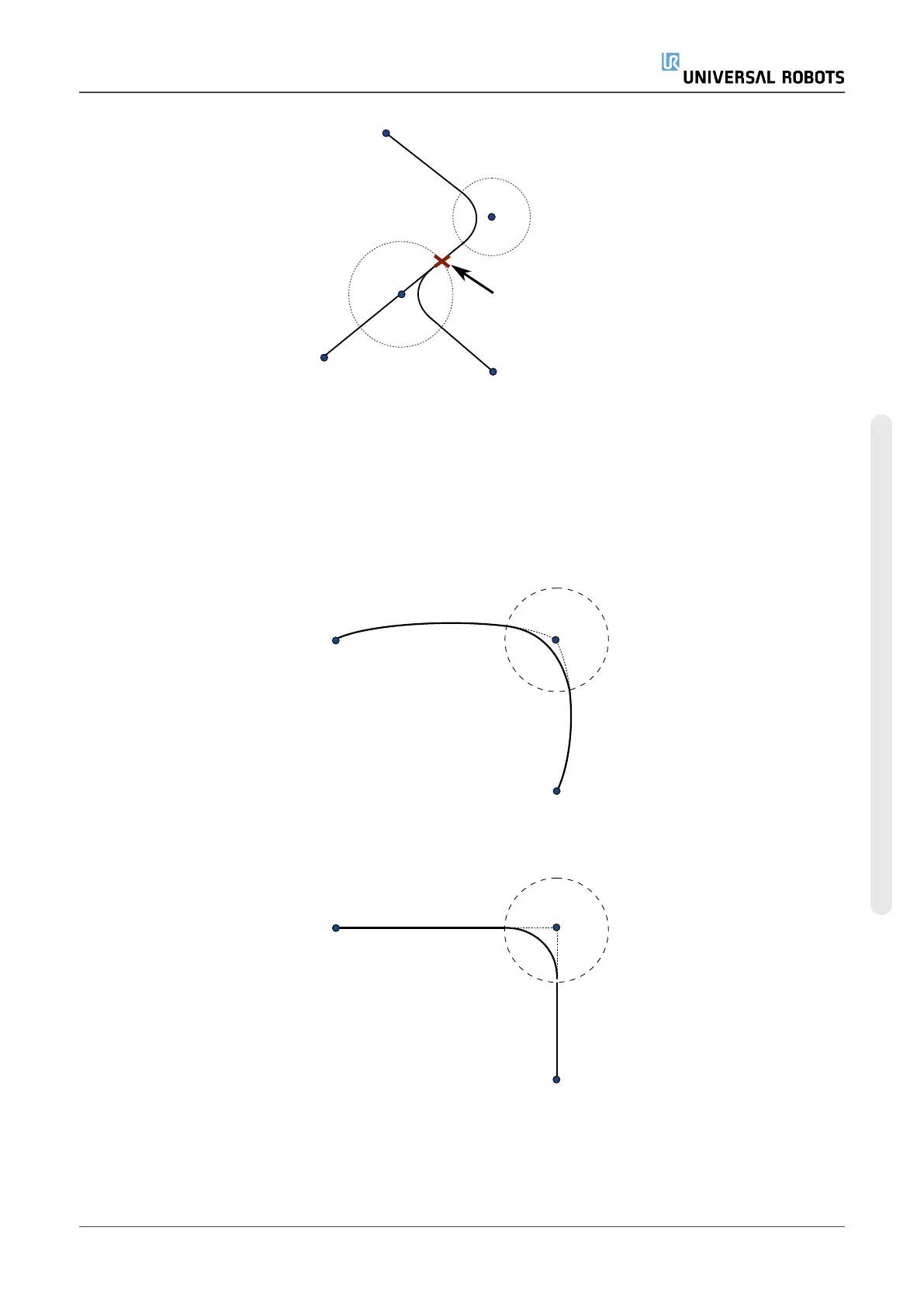
12.5:WP_I is the initial waypoint and there are two potential final waypoints WP_F_1 and WP_F_
2, depending on a conditional expression. The conditional if expression is evaluated when the
robot arm enters the second blend (*).
Blend Trajectories
12.6:Joint space (MoveJ) vs. cartesian space (MoveL) movement and blend.
User Manual 159 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












