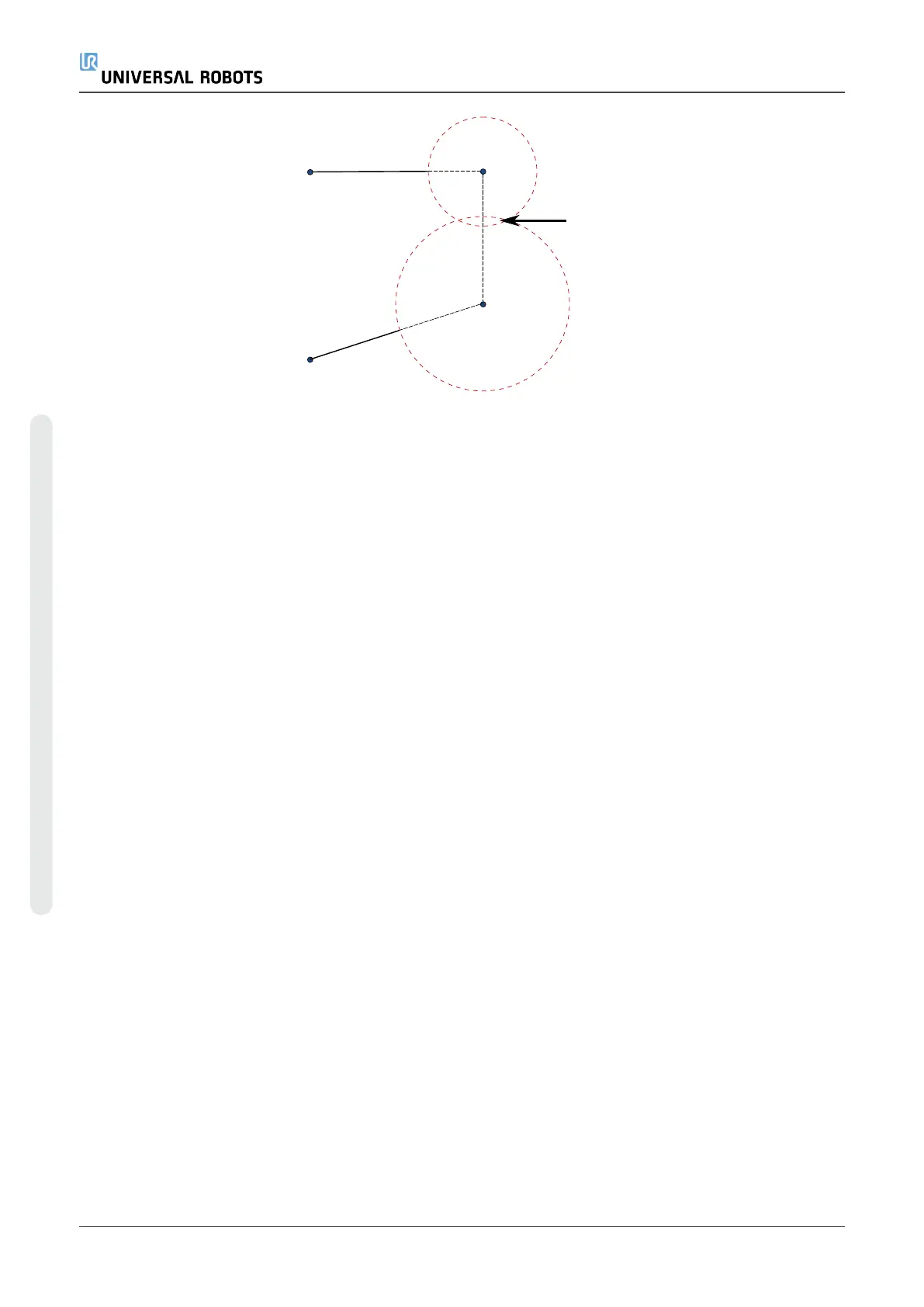
12.4:Blend radius overlap not allowed (*).
Conditional blend trajectories
The blend trajectory is affected both by the waypoint where the blend radius is set and the
following one in the program tree. That is, in the program in figure 12.5 the blend around (WP_1) is
affected by (WP_2) . The consequence of this becomes more apparent when blending around
(WP_2) in this example.
There are two possible ending positions and to determine which is the next waypoint to blend to,
the robot must evaluate the current reading of the digital_input[1] already when entering the
blend radius.
That means the if...then expression (or other necessary statements to determine the following
waypoint, e.g. variable waypoints) is evaluated before we actually reach (WP_2) which is
somewhat counter-intuitive when looking at the program sequence. If a waypoint is a stop point
and followed by conditional expressions to determine the next waypoint (e.g. the I/O command) it
is executed when the robot arm has stopped at the waypoint.
MoveL
WP_I
WP_1 (blend)
WP_2 (blend)
if (digital_input[1]) then
WP_F_1
else
WP_F_2
UR5e 158 User Manual
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












