The stop at (WP_2) can be avoided by configuring a blend for the waypoint, allowing the robot to
calculate a smooth transition into the next trajectory. The primary parameter for the blend is a
radius. When the robot is within the blend radius of the waypoint it can start blending and deviate
from the original path. This allows for faster and smoother movements, as the robot does not need
to decelerate and re-accelerate.
Blend parameters
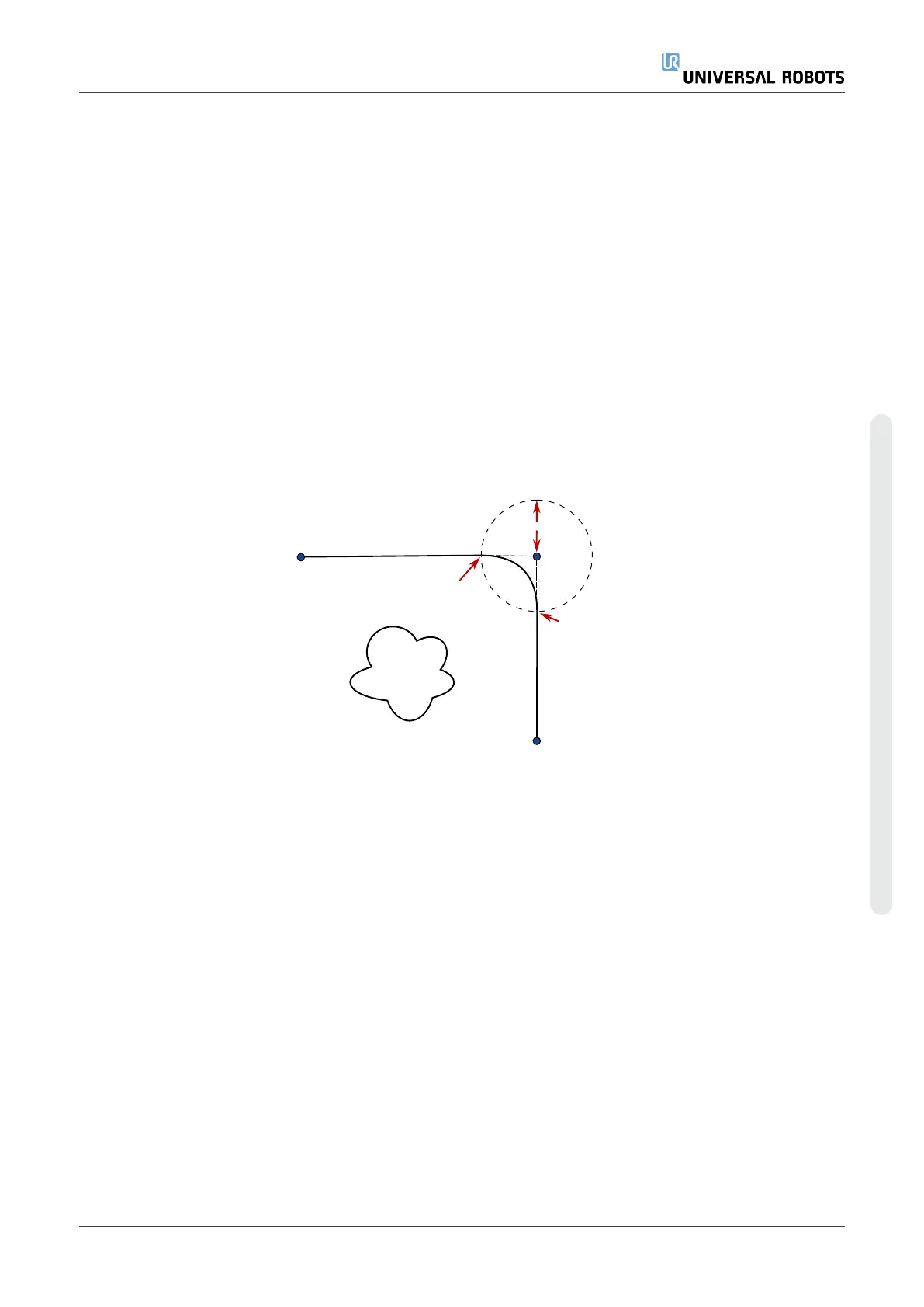
Apart from the waypoints, multiple parameters will influence the blend trajectory (see figure 12.3):
•
the blend radius (r )
•
the initial and final speed of the robot (at positions p1 and p2 , respectively)
•
the movement time (e.g. if setting a specific time for a trajectory this will influence the
initial/final speed of the robot)
•
the trajectory types to blend from and to (MoveL, MoveJ)
12.3:Blend over (WP_2) with radius r , initial blend position at p1 and final blend position at p2 .
(O) is an obstacle.
If a blend radius is set, the robot arm trajectory blends around the waypoint, allowing the robot arm
not to stop at the point.
Blends cannot overlap, so it is not possible to set a blend radius that overlaps with the blend radius
of a previous or following waypoint as shown in figure 12.4.
User Manual 157 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












