5.3 C: Tuning
190 YASKAWA ELECTRIC SIEP C710616 27G YASKAWA AC Drive A1000 Technical Manual
C4-07: Motor 2 Torque Compensation Gain
Functions for motor 2 in the same way that C4-01 functions for motor 1.
Refer to C3-01: Slip Compensation Gain on page 186 for details on adjusting this parameter.
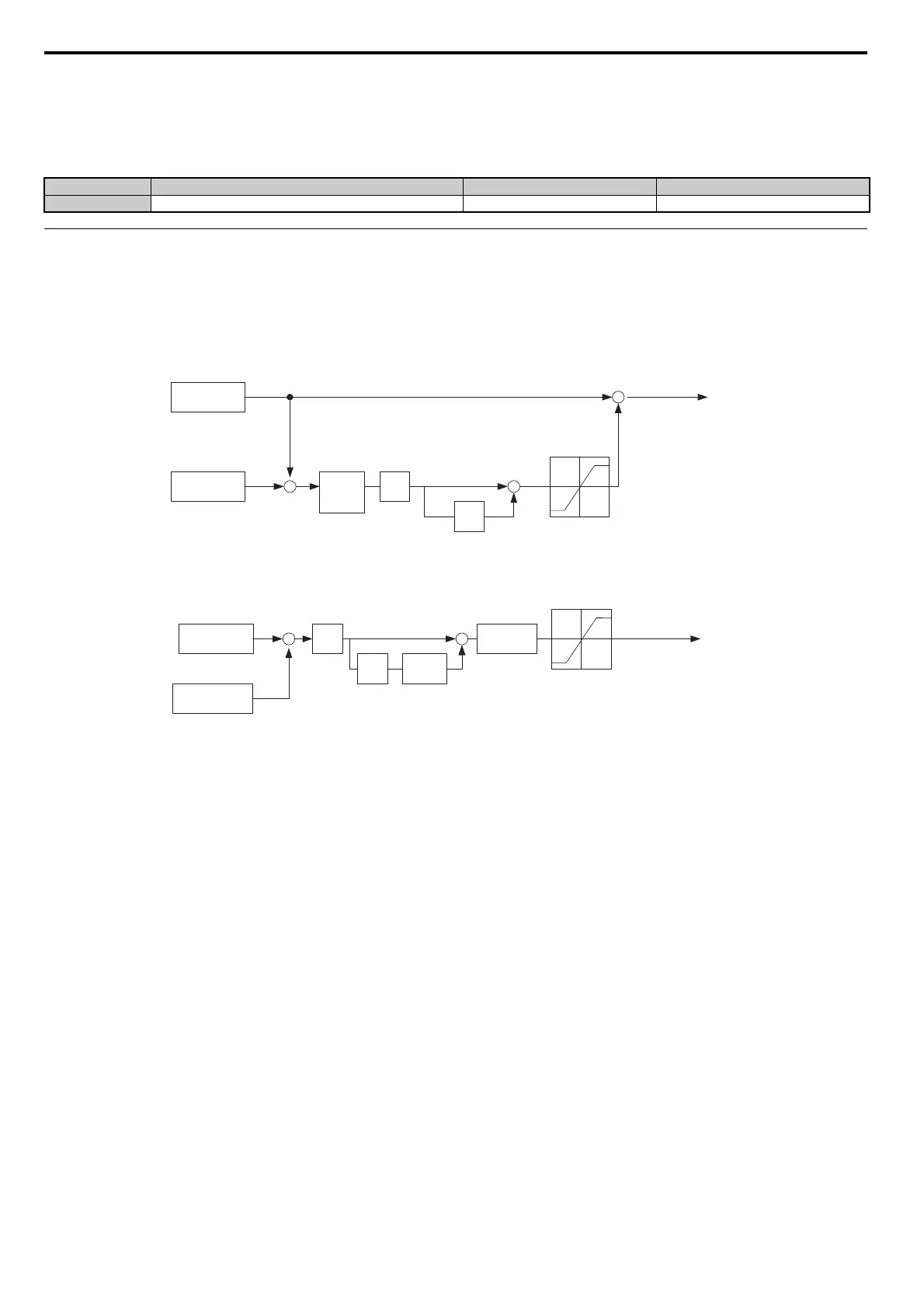
C5: Automatic Speed Regulator (ASR)
The ASR is used for controlling the motor speed in V/f w/PG, CLV, AOLV/PM, and CLV/PM control modes. It adjusts
the output frequency (V/f w/PG) or torque reference (CLV, AOLV/PM, CLV/PM) in order to minimize the difference
between frequency reference and actual motor speed.
Figure 5.38 and Figure 5.39 illustrate how ASR works.
Figure 5.38
Figure 5.38 Speed Control Block Diagram for V/f Control with PG
Figure 5.39
<1> Advanced Open Loop Vector Control for PM motors estimates the speed using the motor model and does not require an encoder
feedback signal.
Figure 5.39 Speed Control Block Diagram for CLV, AOLV/PM and CLV/PM
Adjusting the ASR Parameters
Before adjusting ASR parameters make sure all motor data have been set up correctly or Auto-Tuning has been
performed.
Analog output signals should be used to monitor the frequency reference after softstarter (U1-16) and the
motor speed
(U1-05) when adjusting the ASR. Refer to H4: Multi-Function Analog Outputs on page 262 for details on setting up
analog output functions.
Generally when tuning the ASR,
first optimize the ASR gain, then adjust the integral time settings. Always make
adjustments with the load connected to the motor.
Adjusting the ASR Parameters in V/f Control with PG
In V/f Control with PG, the ASR settings change between two sets of parameters depending on the motor speed as
described in C5-01, C5-03/C5-02, C5-04: ASR Proportional Gain 1, 2 / ASR Integral Time 1, 2 on page 192.
Perform the following steps for adjusting
ASR parameters:
1. Run the motor at minimum speed and increase ASR gain 2 (C5-03) as much as possible without oscillation.
2. Run the motor at minimum speed and decrease ASR integral time 2 (C5-04) as much as possible without
oscillation.
3. Check the output current monitor to make sure that the output current is less than 50% of the drive rated current.
If the value is higher than 50%, decrease C5-03 and increase C5-04.
4. Run the motor at maximum speed and increase ASR gain 1 (C5-01) as much as possible without oscillations.
No. Parameter Name Setting Range Default
C4-07 Motor 2 Torque Compensation Gain 0.00 to 2.50 1.00
P
I
+
+
+
-
+
+
Output frequency
C5-01
C5-03
C5-02, C5-04
C5-05
Frequency
reference
Detected speed
Change
rate
limiter
ASR limit
<1>
P
I
+
+
+
-
C5-02, C5-04
C5-06
I
C5-08
C5-01, C5-03
Frequency
reference
Detected speed
Torque limits
Torque reference
limit
Primary
filter
L7-01 to L7-04