B.3 Parameter Table
510 YASKAWA ELECTRIC SIEP C710616 27G YASKAWA AC Drive A1000 Technical Manual
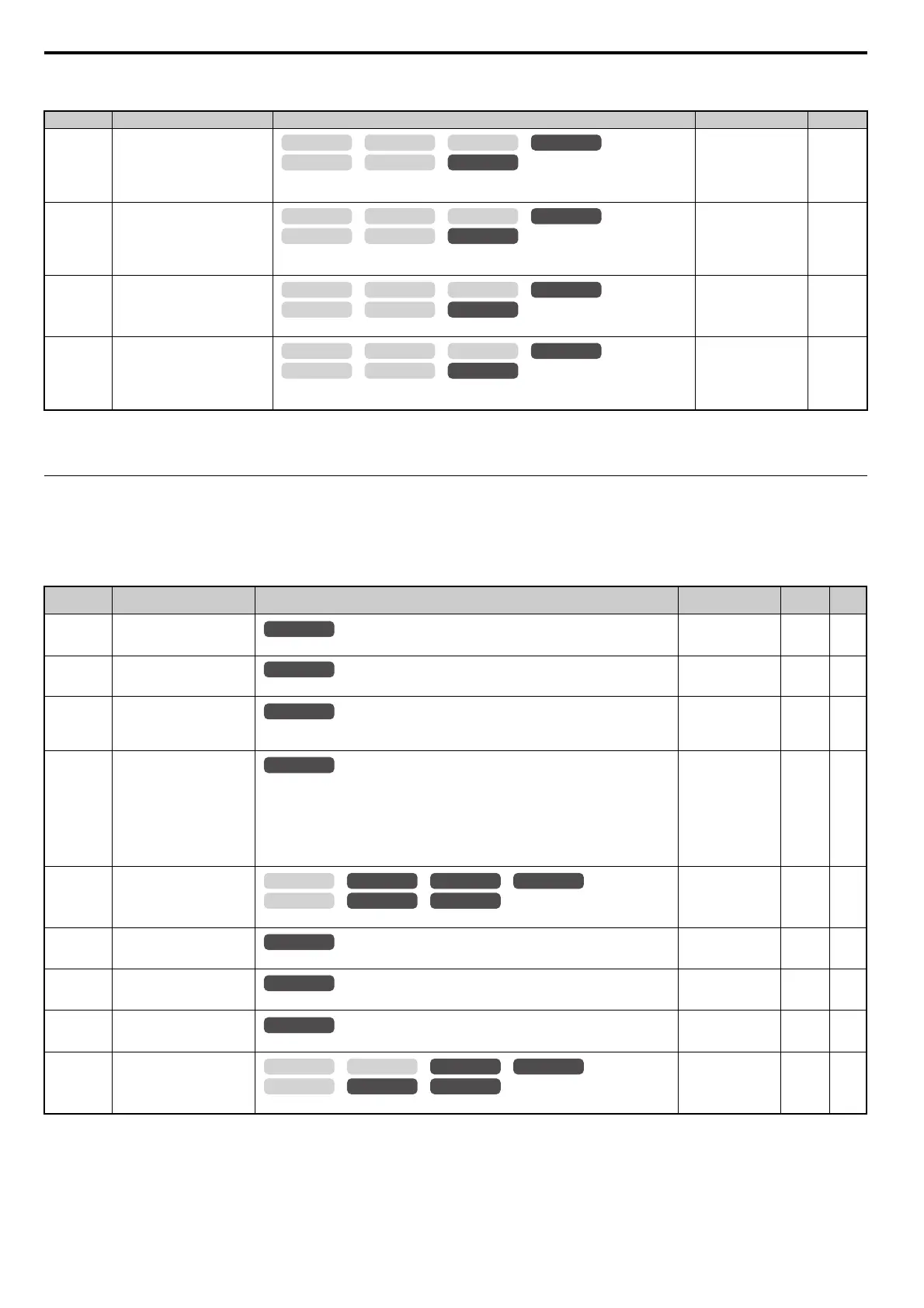
T3: ASR and Inertia Tuning
U: Monitors
Monitor parameters allow the user to view drive status, fault information, and other data concerning drive operation.
U1: Operation Status Monitors
No. (Addr.) Name Description Setting Page
T3-01
(760H)
<9> Default setting value is dependent on the drive model (o2-04) and the Drive Duty (C6-01).
<14> Default setting value is dependent on the motor code set to E5-01.
<40> Displayed only when performing Inertia Tuning or ASR Gain Auto-Tuning (T1-01 = 9 or T2-01 = 9).
Test Signal Frequency
Sets the frequency of the test signal used during Inertia Tuning and ASR Gain Auto-Tuning.
Reduce this value if the inertia is large or if a fault occurs.
Default: 3.0 Hz
Min: 0.1 Hz
Max: 20.0 Hz
133
T3-02
(761H)
Test Signal Amplitude
Sets the amplitude of the test signal used during Inertia and ASR Gain Auto-Tuning. Reduce
this value if the inertia is too large or if a fault occurs.
Default: 0.5 rad
Min: 0.1 rad
Max: 10.0 rad
133
T3-03
(762H)
Motor Inertia
Sets the motor inertia. Default setting is the inertia of a YASKAWA motor.
Default:
<9> <14>
Min: 0.0001 kgm
2
Max: 600.00 kgm
2
133
T3-04
(763H)
<40>
System Response Frequency
Sets the response frequency of the mechanical system connected to the motor. Oscillation may
result if set too high.
Default: 10.0 Hz
Min: 0.1 Hz
Max: 50.0 Hz
133
No. (Addr.) Name Description
Analog Output
Level
Unit Page
U1-01
(40H)
Frequency Reference
Monitors the frequency reference. Display units are determined by o1-03.
10 V: Max frequency
(-10 to +10 V)
0.01 Hz –
U1-02
(41H)
Output Frequency
Displays the output frequency. Display units are determined by o1-03.
10 V: Max frequency
(-10 to +10 V)
0.01 Hz –
U1-03
(42H)
Output Current
Displays the output current.
Note: The unit is expressed in 1 A for models CIMR-A4A0930 and 4A1200.
10 V: Drive rated
current
<19> <23> –
U1-04
(43H)
Control Method
0: V/f Control
1: V/f Control with PG
2: Open Loop Vector Control
3: Closed Loop Vector Control
5: Open Loop Vector Control for PM
6: Advanced Open Loop Vector Control for PM
7: Closed Loop Vector Control for PM
No signal output
available
––
U1-05
(44H)
Motor Speed
Displays the motor speed feedback. Display units are determined by o1-03.
10 V: Max Frequency
(-10 to +10 V)
0.01 Hz –
U1-06
(45H)
Output Voltage Reference
Displays the output voltage.
10 V: 200 Vrms
<18> 0.1 Vac –
U1-07
(46H)
DC Bus Voltage
Displays the DC bus voltage.
10 V: 400 V
<18> 1 Vdc –
U1-08
(47H)
Output Power
Displays the output power (this value is calculated internally).
10 V: Drive rated
power (kW)
<60>
(-10 to +10 V)
<22> –
U1-09
(48H)
Torque Reference
Monitors the internal torque reference.
10 V: Motor rated
torque
(-10 to +10 V)
0.1% –
OLV/PM AOLV/PM
CLV
V/f w/PG
CLV/PM
V/f OLV
OLV/PM AOLV/PM
CLV
V/f w/PG
CLV/PM
V/f OLV
OLV/PM AOLV/PM
CLV
V/f w/PG
CLV/PM
V/f OLV
OLV/PM AOLV/PM
CLV
V/f w/PG
CLV/PM
V/f OLV
All Modes
All Modes
All Modes
All Modes
OLV/PM AOLV/PM
CLV
V/f w/PG
CLV/PM
V/f OLV
All Modes
All Modes
All Modes
OLV/PM AOLV/PM
CLV
V/f w/PG
CLV/PM
V/f OLV