5.9 n: Special Adjustments
YASKAWA ELECTRIC SIEP C710616 27G YASKAWA AC Drive A1000 Technical Manual 307
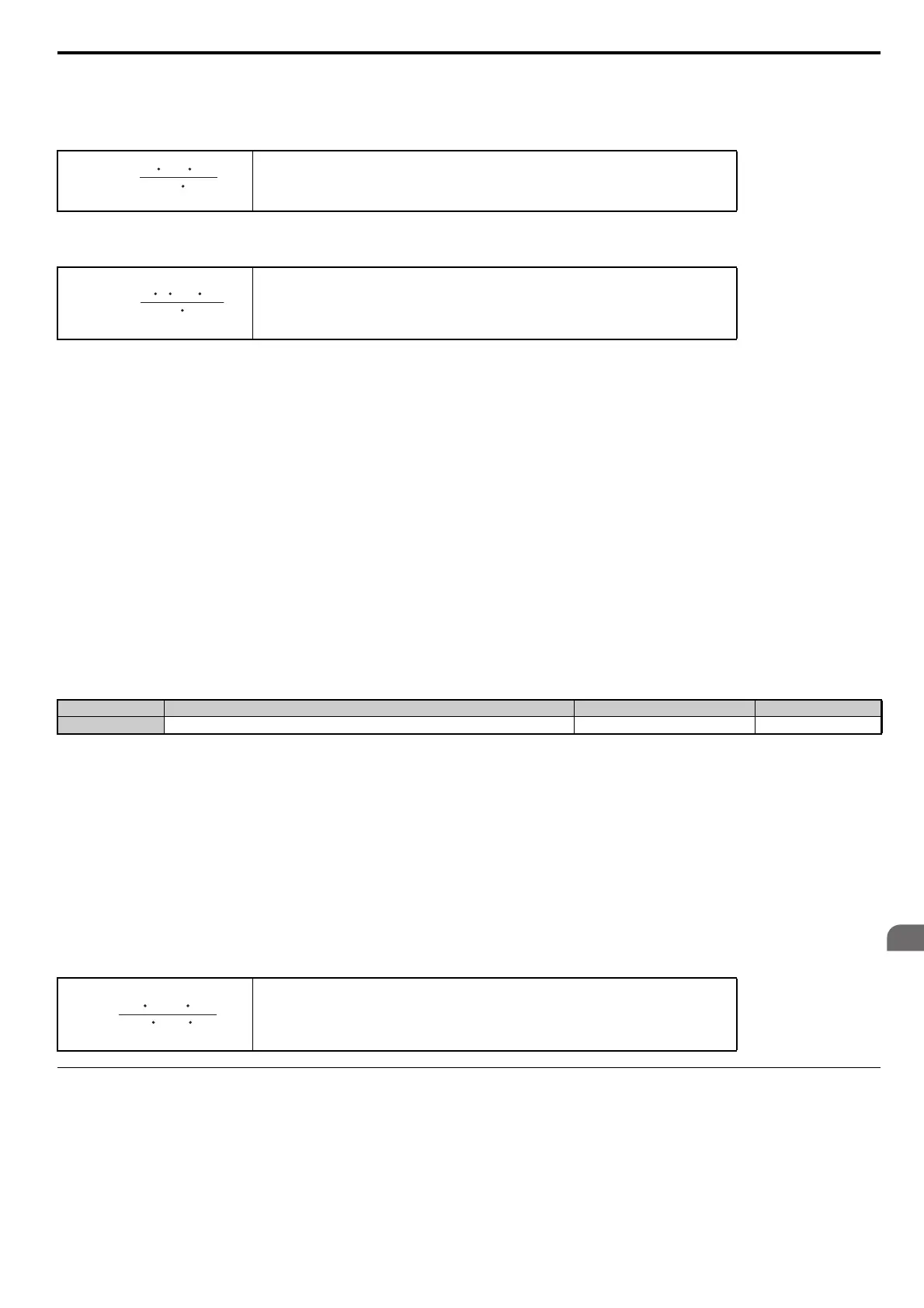
Calculation
The motor acceleration time can be calculated by,
or
Measuring Acceleration Time
Take the following steps when measuring the motor acceleration time.
1.
Select the control mode; CLV (A1-02 = 3), AOLV/PM (A1-02 = 6), or CLV/PM (A1-02 = 7).
2. Decouple motor and load.
3. Make sure Auto-Tuning has been performed or that the correct motor data has been entered manually.
4. Make sure that the speed loop (ASR) has been set up properly.
5. Set the acceleration time to zero.
6. Set the forward torque limit in parameter L7-01 to 100%.
7. Set the frequency reference equal to the motor rated speed.
8. While monitoring the motor speed in U1-05, start the motor in the forward direction and measure the time it takes
to reach the rated speed.
9. Reverse the parameter settings above and set the measured time to parameter n5-02.
n5-03: Feed Forward Control Gain
Parameter n5-03 sets the inertia ratio of the load connected to the motor. This value can be set automatically by Inertia
Auto-Tuning.
This value can be set automatically by Inertia Auto-Tuning. If Inertia Auto Tuning cannot be performed, determine the
value for parameter n5-03 using the following steps.
1. Select the control mode; CLV (A1-02 = 3), AOLV/PM (A1-02 = 6), or CLV/PM (A1-02 = 7).
2. Setup parameter n5-02 correctly.
3. Couple motor and load.
4. Set the acceleration time C1-01 to 0.
5. Set the torque limits in the L7- parameters to a value that will easily be reached during the test (T
Lim_Test
).
6. Set the frequency reference equal to a value in the upper speed range of the machine (f
ref_Test
).
7. While monitoring the motor speed in U1-05, start the motor in the forward direction and measure the time it takes
to reach the reference speed (t
accel
).
8. Reverse the parameter settings above and calculate the set value for parameter n5-03 using the formula below.
n6: Online Tuning
Online Tuning prevents loss from insufficient torque and diminished speed control accuracy due to fluctuating motor
temperature.
Where:
•J
Motor
is the motor inertia in kgm/s
2
.
•n
rated
is the rated speed of the motor in min
-1
•T
rated
is the rated torque of the motor in Nm.
Where:
•J
Motor
is the motor inertia in kgm
2
.
•f
rated
is the rated frequency of the motor in Hz.
• p is the number of motor poles (not pole pairs!).
•T
rated
is the rated torque of the motor in Nm.
No. Parameter Name Setting Range Default
n5-03 Feed Forward Control Gain 0.00 or 100.00 1.00
Where:
•t
accel
is the measured acceleration time in s.
•f
rated
is the rated frequency of the motor in Hz.
•T
Lim_Test
is torque limit setting during the test (%).
•f
ref_Test
is the frequency reference during the test in Hz.
n5-02 =
2π J
Motor
n
rated
60 T
rated
n5-02 =
4 π J
Motor
f
rated
p T
rated
n5-03 =
t
accel
T
Lim_Test
f
rated
n5-02 f
ref_Test
100
- 1