8 System Setup
DX100 8.4 ARM Control
8-49
Iz = 3 * ((100 - 100)
2
+ (50 - (-83))
2
) * 10
-6
+ 6 * ((100 - 100)
2
+ ((-150) - (-83))
2
) * 10
-6
= 0.080 = approx. 0.100
* The own moment of inertia (Icxi, Icyi, Iczi) of the gun is disregarded in
this example, since each gun is smaller than the entire tool.
<Setting>
8.4.3.3 Tool Load Information Registering
Tool load information is registered in the tool file.
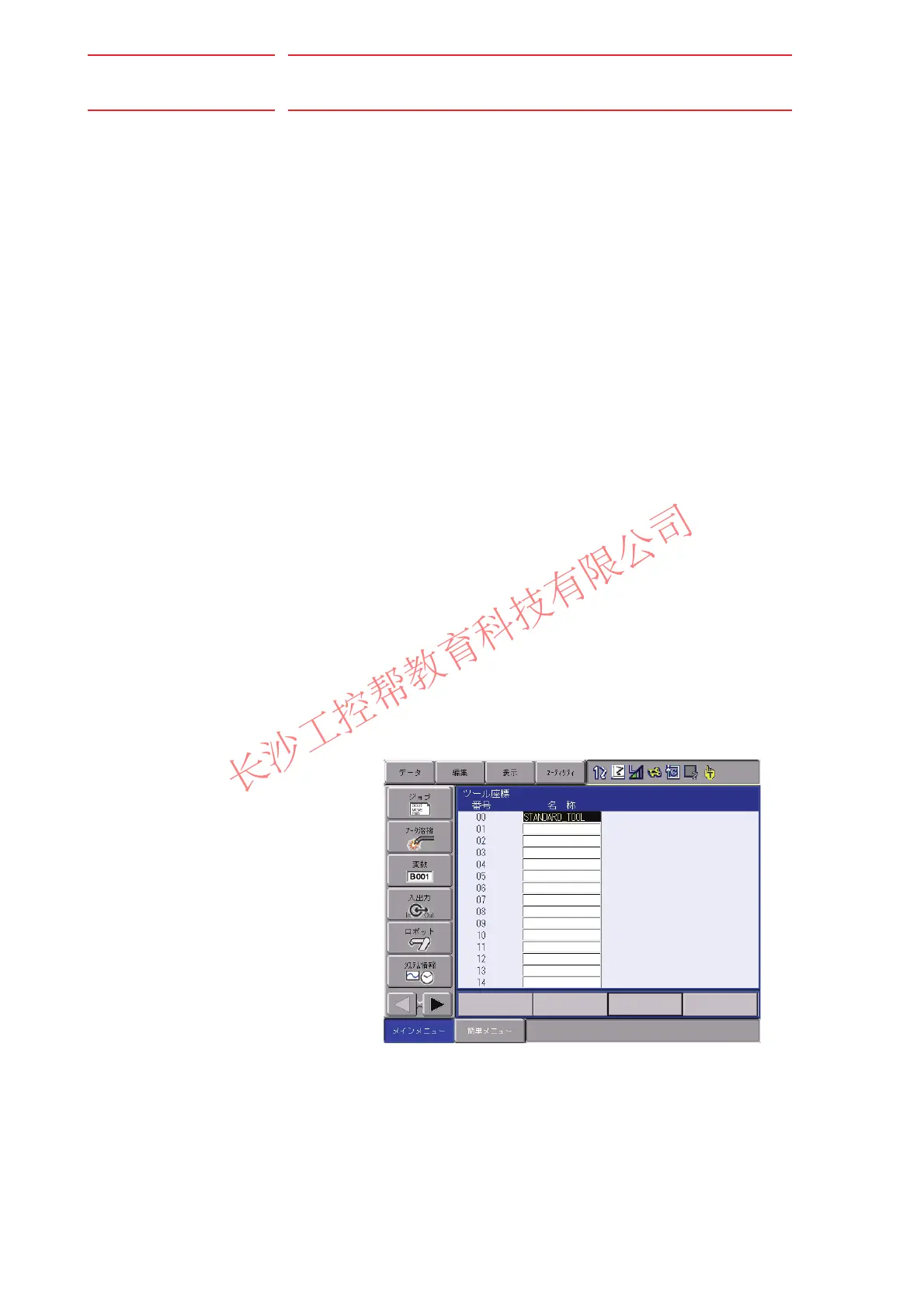
1. Select {ROBOT} under the main menu.
2. Select {TOOL}.
– The tool coordinate window appears.
– The tool coordinate window appears only when the file extension
function is valid.
– When the file extension function is invalid, the tool list window
appears.
• W : 10.000 kg
• Xg : 100.000 mm
• Yg : -83.333 mm
• Zg : 60.000 mm
• Ix : 0.100 kg.m
2
• Iy : 0.010 kg.m
2
• Iz : 0.100 kg.m
2

 Loading...
Loading...









