8 System Setup
DX100 8.6 Interference Area
8-56
8.6 Interference Area
8.6.1 Interference Area
The interference area is a function that prevents interference between
multiple manipulators or the manipulator and peripheral device. The area
can be set up to 32 area. There are two types of interference areas, as
follows:
• Cubic Interference Area
• Axis Interference Area
The DX100 judges whether the TCP of the manipulator is inside or outside
this area, and outputs this status as a signal.
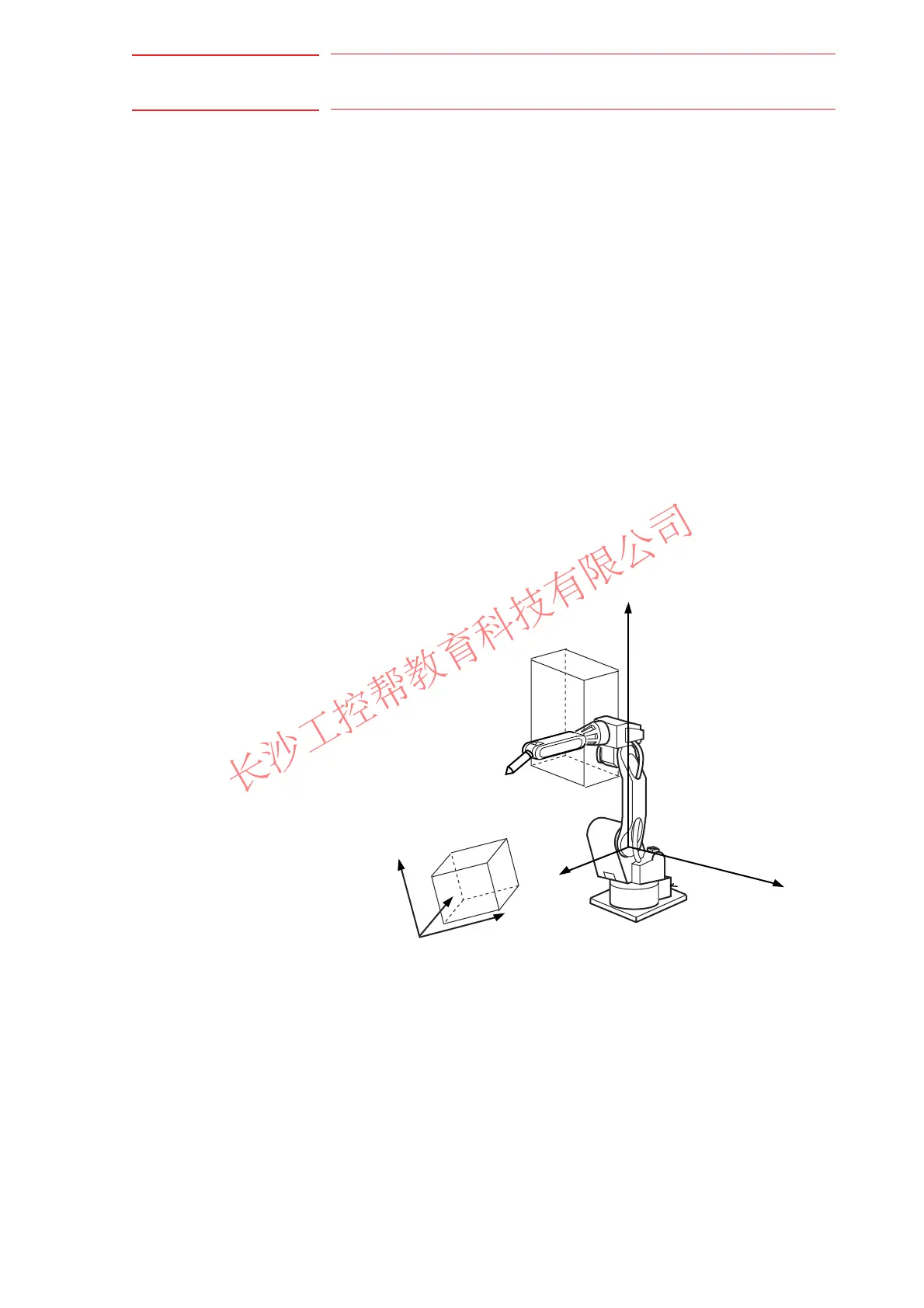
8.6.2 Cubic Interference Area
8.6.2.1 Cubic Interference Area
This area is a rectangular parallelepiped which is parallel to the base
coordinate, robot coordinate, or user coordinate. The DX100 judges
whether the current position of the manipulator’s TCP is inside or outside
this area, and outputs this status as a signal.
8.6.2.2 Cube Setting Method
There are three ways to set cubic a interference area as described in the
following sections:
1. Enter the maximum and minimum values for the cube coordinates.
Cubic
interference
area
Robot coordinate
Z-axis
X-axis
User Coordinates
Z-axis
Cubic
interference
area
X-axis
Y-axis
Y-axis

 Loading...
Loading...









