Description of the Software Modules and Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07
245
of 820
4
Transferring the set values from the fieldbus task into the position/speed
controller.
At 250 µs cycle time or greater the set values are transferred in the next RT0 cycle after
the fieldbus task was started.
At 125 µs cycle time the set values are transferred in the RT0 cycle after next one, so that
the fieldbus task is available of more computing time.
Via the parameter Z131.23– Fieldbus options bit 1 can be set that the acceptance of the
set values in the position/speed controller takes place in the beginning of the next fieldbus
cycle only.
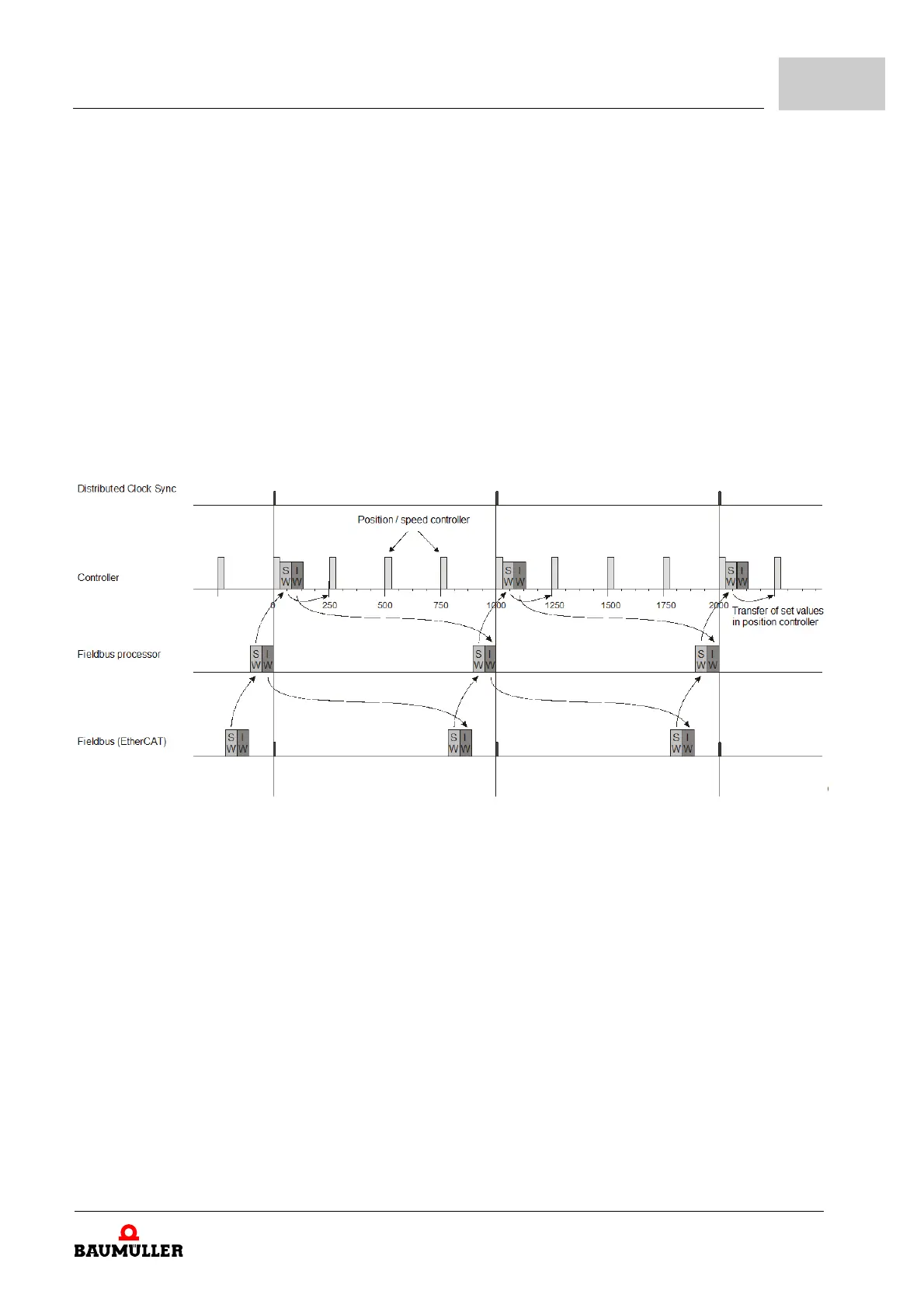
Transmission sequence from the fieldbus to the controller
The basic sequence from fieldbus transmission (here EtherCAT) up to the processing in
the controller is shown in the following figure.
Figure 105: Set value and actual value transfer from the fieldbus to the controller. The configuration fieldbus
cycle 1
ms, RT0 cycle 250 µs, sync offset 0 µs is shown in the example.
In the controller the set value as well as the actual value transmission takes place in the
fieldbus task. The set values (at a sync offset of 0
µs) must reach the controller before the
sync signal takes place. As the fieldbus processor requires time to receive the data from
the fieldbus and then to provide it to the controller, this data must be provided to the field
-
bus in time. Alternatively the fieldbus task start and resultant the transmission in the con-
troller can be delayed via the sync offset.
During data exchange between the controller and the fieldbus processor the set values
and the actual values are exchanged back to back. The same applies for data exchange
to the fieldbus (default behavior at EtherCAT: common frame for set values and actual
values).Consequential the actual values are delayed by about two fieldbus cycles.