Operating Modes
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
574
of 820
4.8
118.7 Clip environment 1
If the actual value of the position reaches a window in the surrounding area of the target
position, the Bit "Clip environment 1 reached" is set in the
Z118.1– Status (Bit 16). This
window is located symmetrical in the surrounding area of the target position. This param-
eter defines its size.
The setting of the parameter also influences the Bit 18 "Position actual value >= Clip en-
vironment 1" in the Z118.1– status and Bit 20 "Switch position ON".
118.8 Clip environment 2
If the actual value of the position reaches a window in the surrounding area of the target
position, the Bit "Clip environment 2 reached" is set in the
Z118.1– Status (Bit 16). This
window is located symmetrical in the surrounding area of the target position. This param-
eter defines its size.
The setting of the parameter also influences the Bit 19 "Position actual value >= Clip en-
vironment 2" in the Z118.1– status and Bit 20 "Switch position ON".
118.9 Positioning target position
In this parameter, the target position is set for the positioning set 0 (Z118.6– Positioning
record number actual = 0).
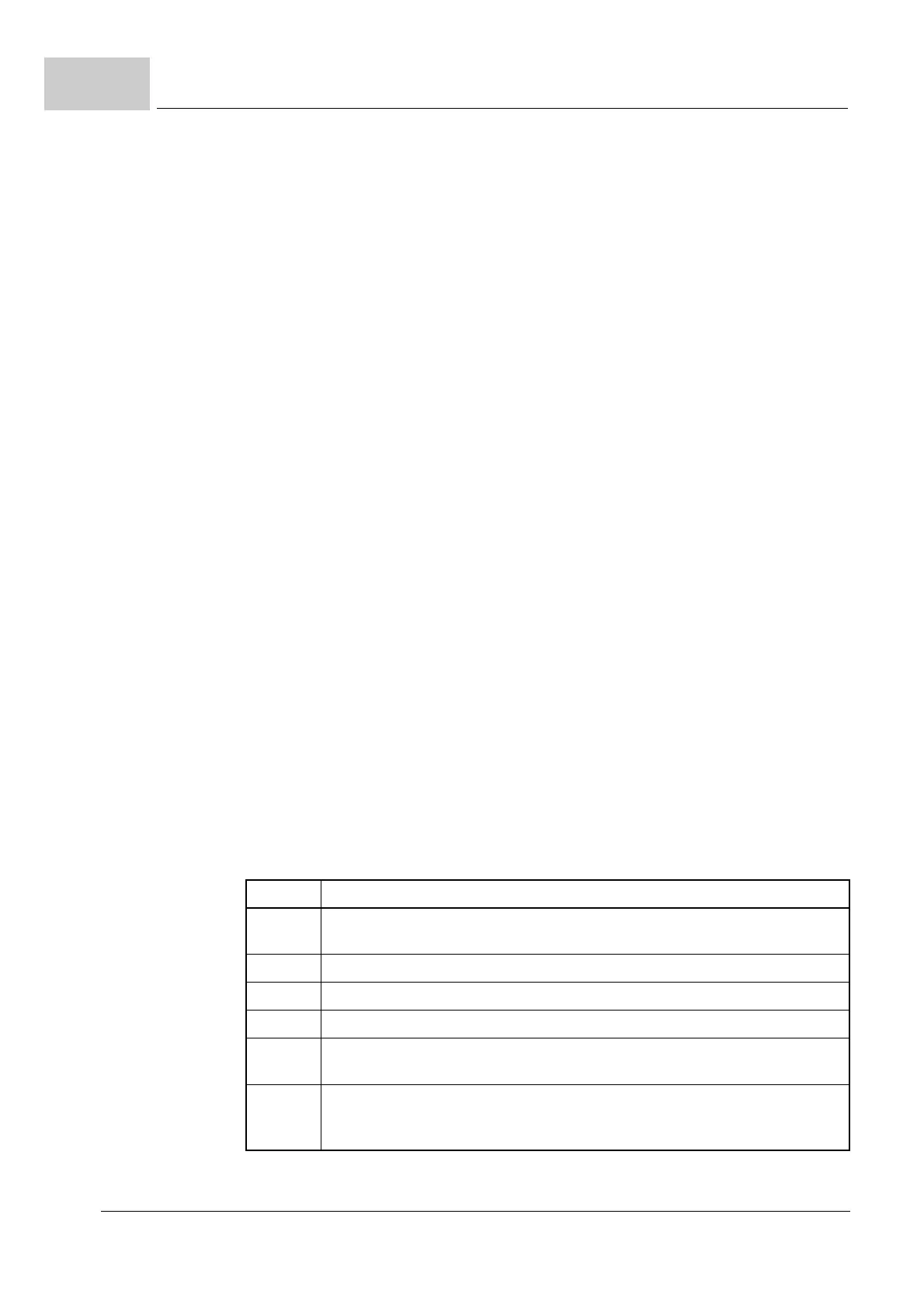
118.10 Positioning target mode
The target mode for the positioning set 0 determines how the indicated positioning target
will be interpreted. Unless otherwise indicated, Parameter
Z118.9– Positioning Target
Position is used as the target position.
Value Meaning
-2 Relative positioning in negative direction relative to the actual position ("fly-
ing").
-1 Relative positioning in negative direction relative to last target.
0 Absolute positioning; limited to max. traversing range.
1 Relative positioning in positive direction relative to last target.
2 Relative positioning in positive direction relative to the actual position ("fly-
ing").
3 Absolute positioning in the direction of the shortest path to the target, which
means maximum traversing range may be exceeded (Condition: software
end switch OFF!).