Summary of all Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
772
of 820
6
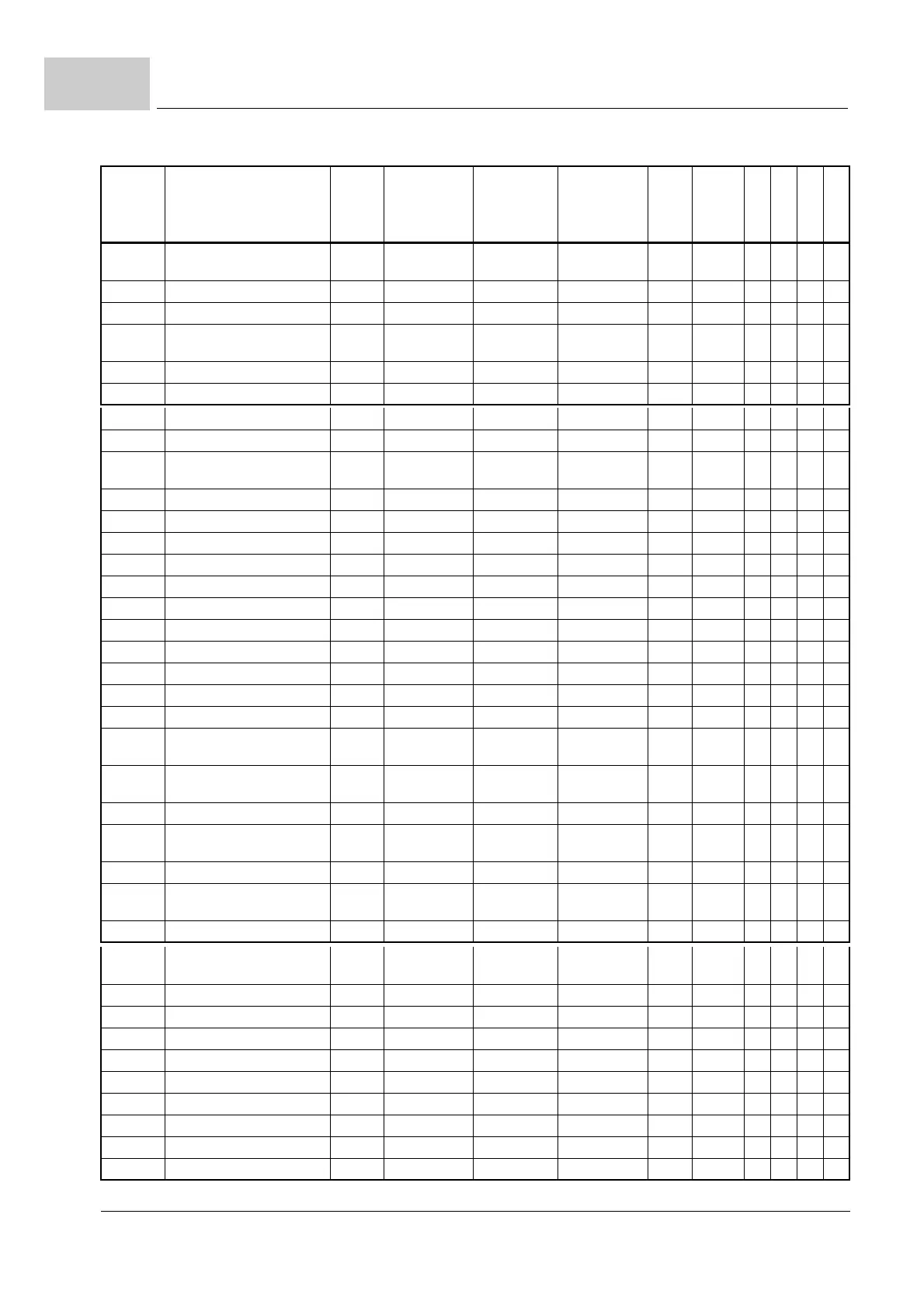
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
6.30 Motor apparent current
smoothed
FLOAT 0 10000 0 A 1:1 X
6.32 Motor real power smoothed FLOAT -1000000 1000000 0 kW 1:0.001 X
6.39 Motor I2t warning threshold FLOAT 0 1000 0 % 1:1 X
6.42 Smoothing time electr. motor
power display
FLOAT 0 1000 1.25 ms 1:1 X
6.43 Motor I2t monitoring mode UINT 0 0xFFFF 0 1:1 X
6.46 Motor I2t derating factors FLOAT 10 100 100 % 1:1 X
14.1 Min value amplitude SinCos FLOAT 0 141.42 30 % 1:1 X
14.2 Max value amplitude SinCos FLOAT 0 141.42 125 % 1:1 X
14.3 Actual value amplitude Sin-
Cos
FLOAT 0 141.42 0 % 1:1 X
14.4 Variance of sin²+cos² FLOAT 0 141.42 0 % 1:1 X
14.5 Average sin²+cos² FLOAT 0 2896 0 Inc 1:1 X
14.6 Max sin²+cos² variance FLOAT 0 141.42 100 % 1:1 X X
14.7 Variance quality factor FLOAT 0 141.42 0 1:1 X
14.8 Absolute range of fluctuation FLOAT 0 141.42 0 % 1:1 X
14.9 Tolerance FLOAT 0 141.42 50 % 1:1 X X
14.10 Max error count amplitude UINT 0 0x001F 1 1:1 X
14.11 Error count lower limit UINT 0 0x001F 0 1:1 X
14.12 Error count upper limit UINT 0 0x001F 0 1:1 X
14.13 Max error count sector UINT 0 0x001F 1 1:1 X
14.14 Error count sector UINT 0 0x001F 0 1:1 X
14.15 Max error count incremental
encoder
UINT 0 0x001F 1 1:1 X
14.16 Error count incremental
encoder
UINT 0 0x001F 0 1:1 X
14.17 Encoder error mask UDINT 0 0x7F 0x1F 1:1 X
14.19 Cycle time variance calcula-
tion
UDINT 0 0x7FFFFFFF 10000 ms 1:1 X
14.20 Status variance calculation UDINT 0 0xFFFF 0 1:1 X
14.21 Position monitoring error
threshold
FLOAT 0.0 360.0 45.0 Grad 1:1 X
14.22 Position monitoring error FLOAT -360.0 360.0 0 Grad 1:1 X
18.4 Controller actual operation
mode
INT 10 18 10 1:1 X
18.7 Adaptation time parameter UDINT 0 10000 1950 ms 1:1 X X
18.9 Controller options DWORD 0 0xFFFFFFFF 0 1:1 X
18.10 Position controller status DWORD 0 0xFFFFFFFF 0 1:1 X
18.11 w1 position set value FLOAT -1000000 1000000 0 Grad 1:1 X
18.12 x1 position actual value FLOAT -1000000 1000000 0 Grad 1:1 X
18.13 e1 Position controller error FLOAT -1000000 1000000 0 Grad 1:1 X
18.14 Kv position controller FLOAT 0 1000000 20 1/s 1:1 X X
18.15 w2-Feedforward factor FLOAT 0 10 1 1:1 X X X
18.17 w2 speed feed forward FLOAT -1000000 1000000 0 Grad/s 1:1 X