Commissioning
The selection Poti P is only available if the parameter Local/Remote 412 was set like
described above.
JOG
The function JOG is applicable for fixed speed operation.
• Switch on enable signals at digital inputs STOA (terminal X11.3) and STOB (terminal X13.3).
• If digital inputs are intended for start-signals: Switch off the signals of the parameters
Start
clockwise
68 and Start anticlockwise 69
1
.
• Select via arrow keys. Confirm by pressing ENT.
• Select via arrow keys. Confirm by pressing ENT.
Keep pressed: The drive accelerates to the JOG frequency 489 (factory setting
5 Hz).
For clockwise rotation: Set the JOG frequency 489 to positive values.
For anticlockwise rotation: Set the
JOG frequency 489 to negative values.
Set the acceleration value for clockwise rotation in parameter Acceleration
(clockwise)
420.
Set the acceleration value for anticlockwise rotation in parameter
Acceleration
anticlockwise
422.
Parameter Maximum frequency 419 limits the adjustable frequency range.
Release the key: The drive decelerates and comes to a standstill.
Set the deceleration value for clockwise rotation in parameter Deceleration
(clockwise)
421.
Set the deceleration value for anticlockwise rotation in parameter Deceleration
direction of
The direction of rotation changes.
The direction of rotation can be changed while the drive rotates or at standstill.
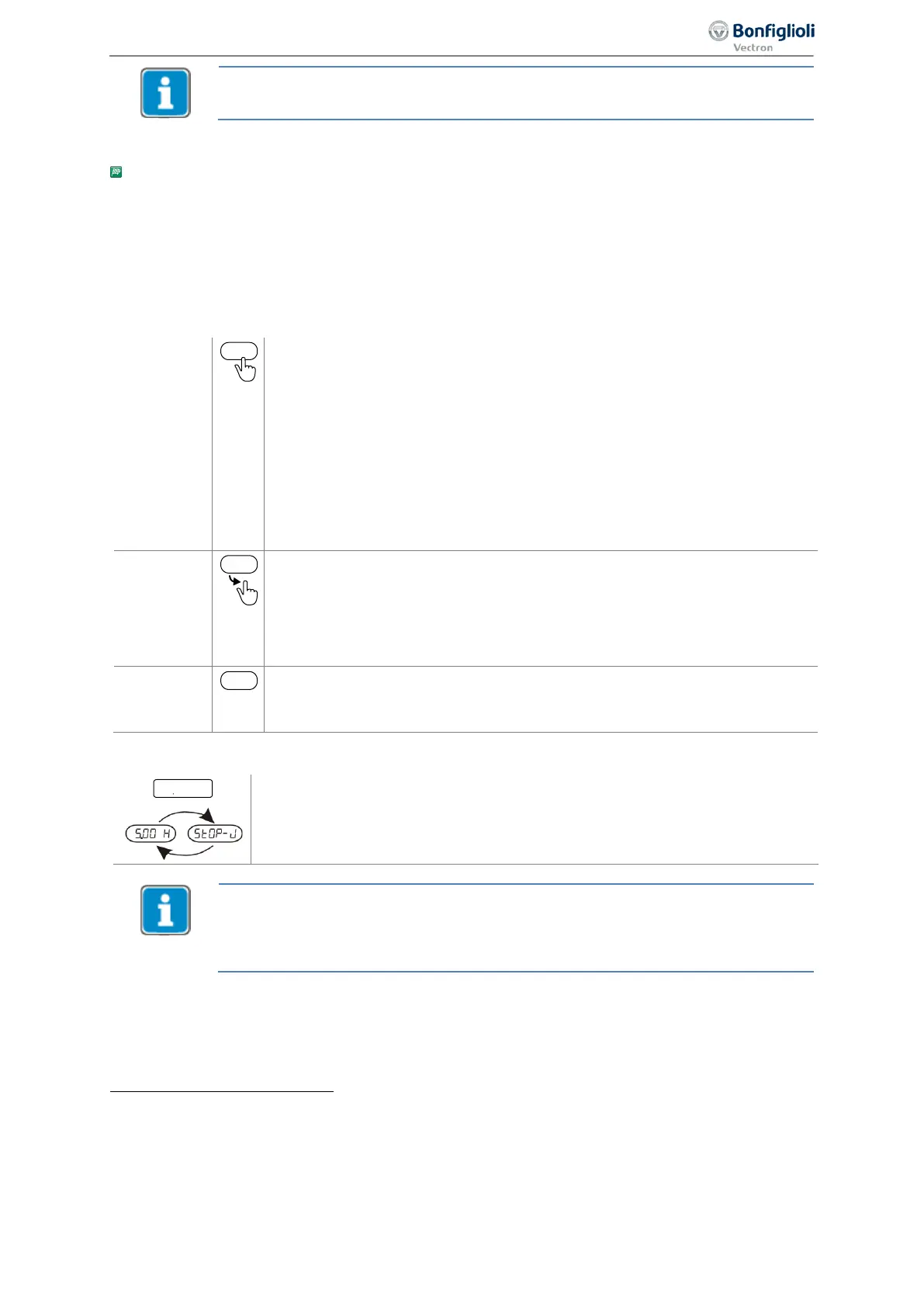
Display of drive status:
The drive rotates at JOG frequency 489.
The alternating display shows the Jog frequency value and the message STOP.
The function JOG can also be activated via a digital input. Refer to chapter 7.5.1.6
“
JOG frequency” and 7.6.6.7 “Jog Start”.
The selection JOG is available indepe
ndent of the setting of parameter L
412.
1
The commands Start clockwise and Start anticlockwise have a higher priority than the start of the function JOG.
59
Operator panel 06/2013 Operating Instructions
Agile

 Loading...
Loading...







