Programming Guide | VLT® AutomationDrive FC 360
The speed feedback is multiplied by this factor.
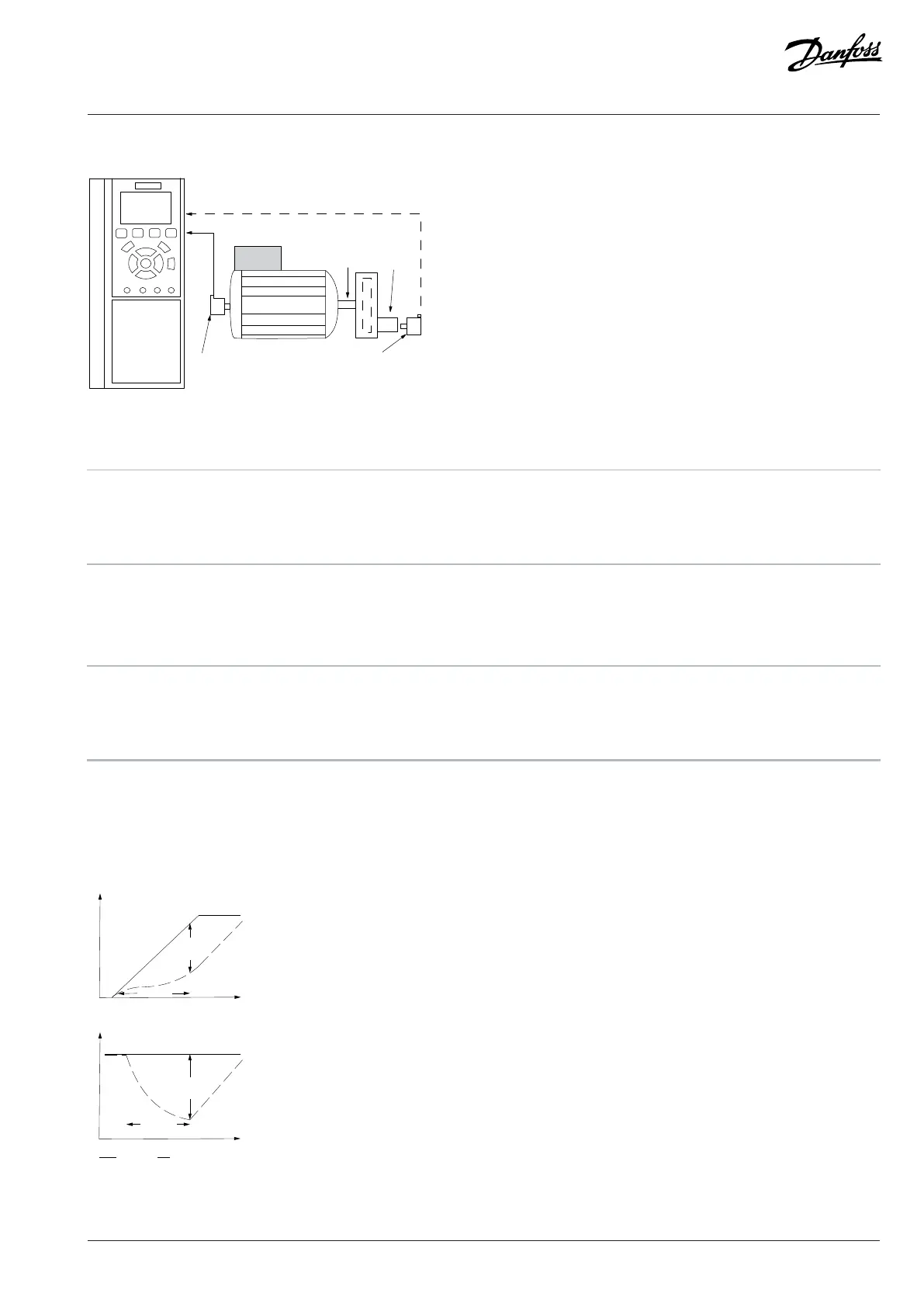
Par 7-07= 1.00 Par 7-07= n1/n2
Figure 37: Speed PID Feedback Gear Ratio
7-08 Speed PID Feed Forward Factor
Default value: 0% Parameter type: Range (0–500%)
Setup: All setups Conversion index: 0
Data type: Uint16 Change during operation: False
The reference signal bypasses the speed controller by the amount specified. This feature increases the dynamic performance of the
speed control loop.
7-09 Speed PID Error Correction w/ Ramp
Default value: 300 RPM Parameter type: Range (10–100000 RPM)
Setup: All setups Conversion index: 0
Data type: Uint32 Change during operation: True
Specify the speed error, between ramp and actual speed, which must be corrected by the ramp.
The speed error between ramp and actual speed is held up against the setting in this parameter. If the speed error exceeds this
parameter entry, the speed error is corrected via ramping in a controlled way.
Figure 38: Speed Error Between Ramp and Actual Speed
Danfoss A/S © 2024.01 AU275649936274en-001401 / 130R0507 | 161

 Loading...
Loading...











