Option Name Description
[3] Adaptive 1 Optimized for smooth steady state
operation, with extra active damping.
[4] Adaptive 2 Focus on low-inductance PM motors. This
option is an alternative to [3] Adaptive 1.
4.2.2 1-1* Motor Selection
Parameter group for setting general motor data. This parameter group cannot be adjusted while the motor is running.
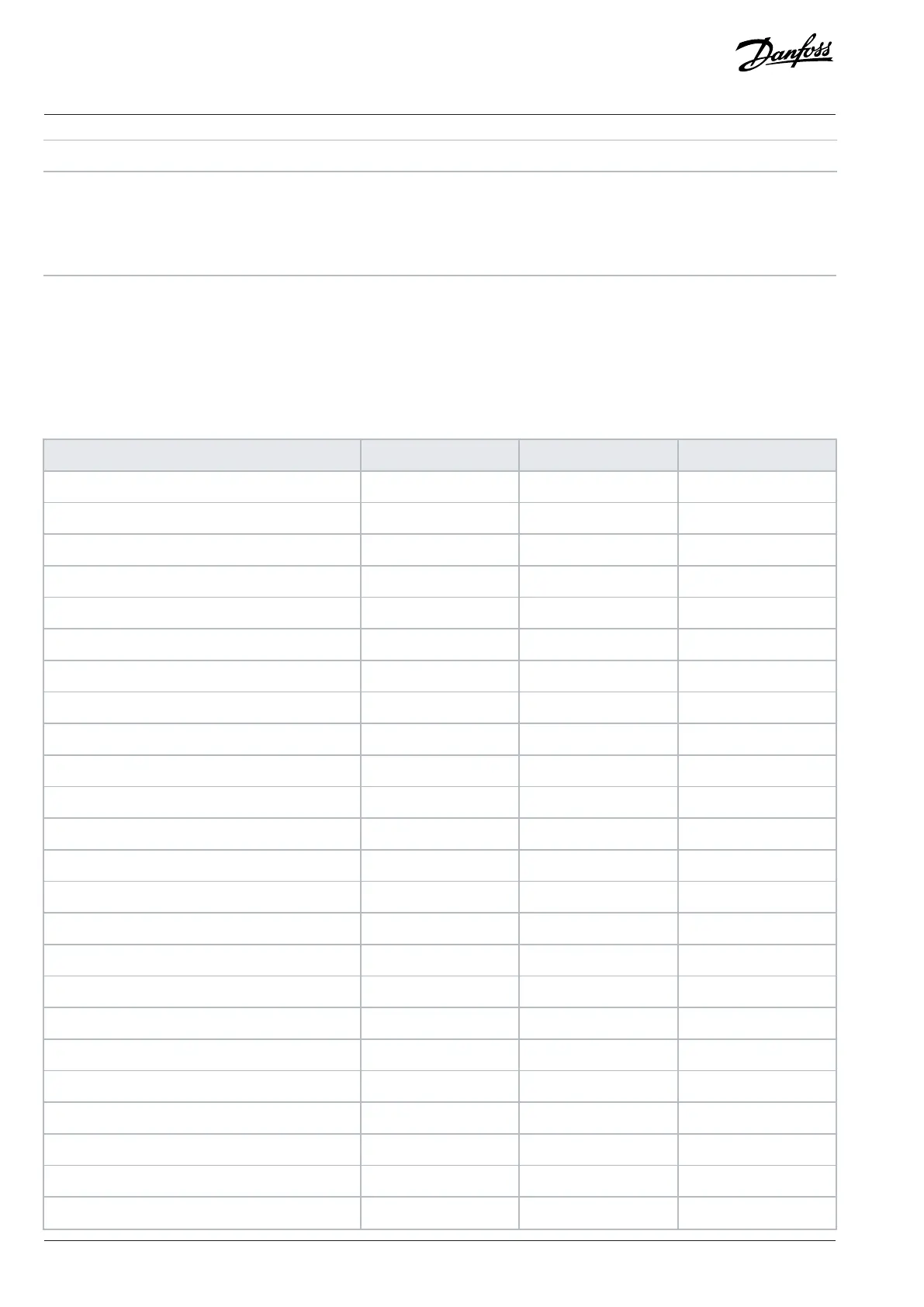
The active parameters are shown in the following table. x indicates that a particular parameter is active when the option is selected.
Table 12: Active Parameters
Parameter 1-10 Motor Construction [0] Asynchron [1] PM, non salient SPM [3] PM, salient IPM
Parameter 1-00 Configuration Mode x x x
Parameter 1-03 Torque Characteristics x
Parameter 1-06 Clockwise Direction x x x
Parameter 1-07 Motor Angle Offset Adjust x x
Parameter 1-08 Motor Control Bandwidth x x x
Parameter 1-14 Damping Gain x x
Parameter 1-15 Low Speed Filter Time Const. x x
Parameter 1-16 High Speed Filter Time Const. x x
Parameter 1-17 Voltage Filter Time const. x x
Parameter 1-18 Min. Current at No Load x x
Parameter 1-20 Motor Power [kW] x
Parameter 1-22 Motor Voltage x
Parameter 1-23 Motor Frequency x
Parameter 1-24 Motor Current x x x
Parameter 1-25 Motor Nominal Speed x x x
Parameter 1-26 Motor Cont. Rated Torque x x
Parameter 1-29 Automatic Motor Adaption (AMA) x x x
Parameter 1-30 Stator Resistance (Rs) x x x
Parameter 1-31 Rotor Resistance (Rr) x
Parameter 1-33 Stator Leakage Reactance (X1) x
Parameter 1-35 Main Reactance (Xh) x
Parameter 1-37 d-axis Inductance (Ld) x x
Parameter 1-38 q-axis Inductance (Lq) x
Parameter 1-39 Motor Poles x x x
52 | Danfoss A/S © 2024.01 AU275649936274en-001401 / 130R0507
Programming Guide | VLT® AutomationDrive FC 360

 Loading...
Loading...











