Programming Guide | VLT® AutomationDrive FC 360
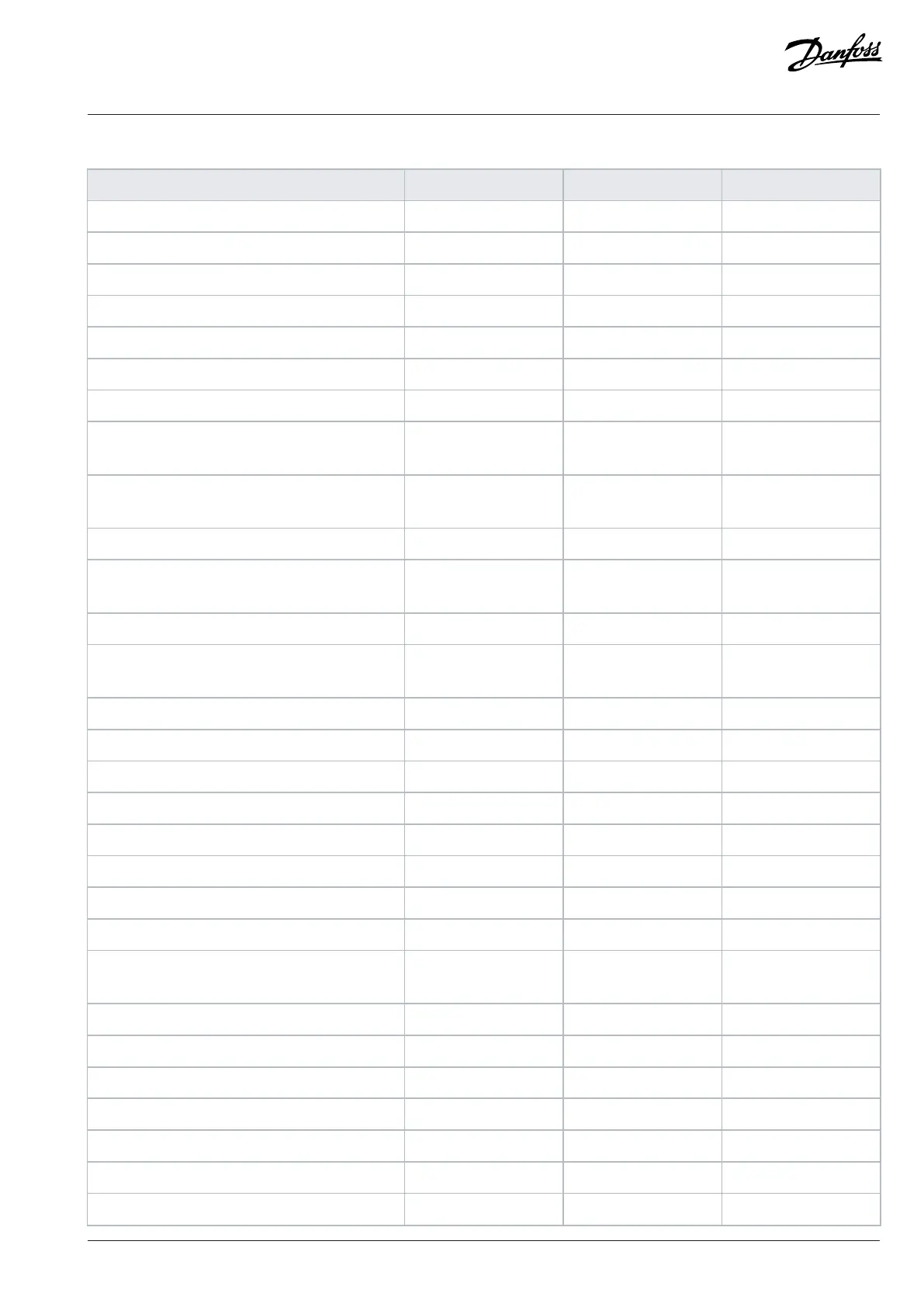
Table 12: Active Parameters (continued)
Parameter 1-10 Motor Construction [0] Asynchron [1] PM, non salient SPM [3] PM, salient IPM
Parameter 1-40 Back EMF at 1000 RPM x x
Parameter 1-41 Motor Angle Offset x x
Parameter 1-42 Motor Cable Length x x x
Parameter 1-43 Motor Cable Length Feet x x x
Parameter 1-44 d-axis Inductance Sat. (LdSat) x
Parameter 1-45 q-axis Inductance Sat. (LqSat) x
Parameter 1-46 Position Detection Gain x x
Parameter 1-48 Current at Min Inductance for d-
axis
x
Parameter 1-49 Current at Min Inductance for q-
axis
x
Parameter 1-50 Motor Magnetisation at Zero Speed x
Parameter 1-52 Min Speed Normal Magnetising
[Hz]
x
Parameter 1-53 Model Shift Frequency x x x
Parameter 1-54 Voltage reduction in
fieldweakening
x x x
Parameter 1-55 U/f Characteristic - U x
Parameter 1-56 U/f Characteristic - F x
Parameter 1-57 Torque Estimation Time Constant x x x
Parameter 1-60 Low Speed Load Compensation x
Parameter 1-61 High Speed Load Compensation x
Parameter 1-62 Slip Compensation x
Parameter 1-63 Slip Compensation Time Constant x
Parameter 1-64 Resonance Dampening x
Parameter 1-65 Resonance Dampening Time
Constant
x
Parameter 1-66 Min. Current at Low Speed x x
Parameter 1-67 Load Type x
Parameter 1-68 Motor Inertia x x x
Parameter 1-69 System Inertia x x x
Parameter 1-70 Start Mode x x
Parameter 1-71 Start Delay x x x
Parameter 1-72 Start Function x x x
Danfoss A/S © 2024.01 AU275649936274en-001401 / 130R0507 | 53

 Loading...
Loading...











