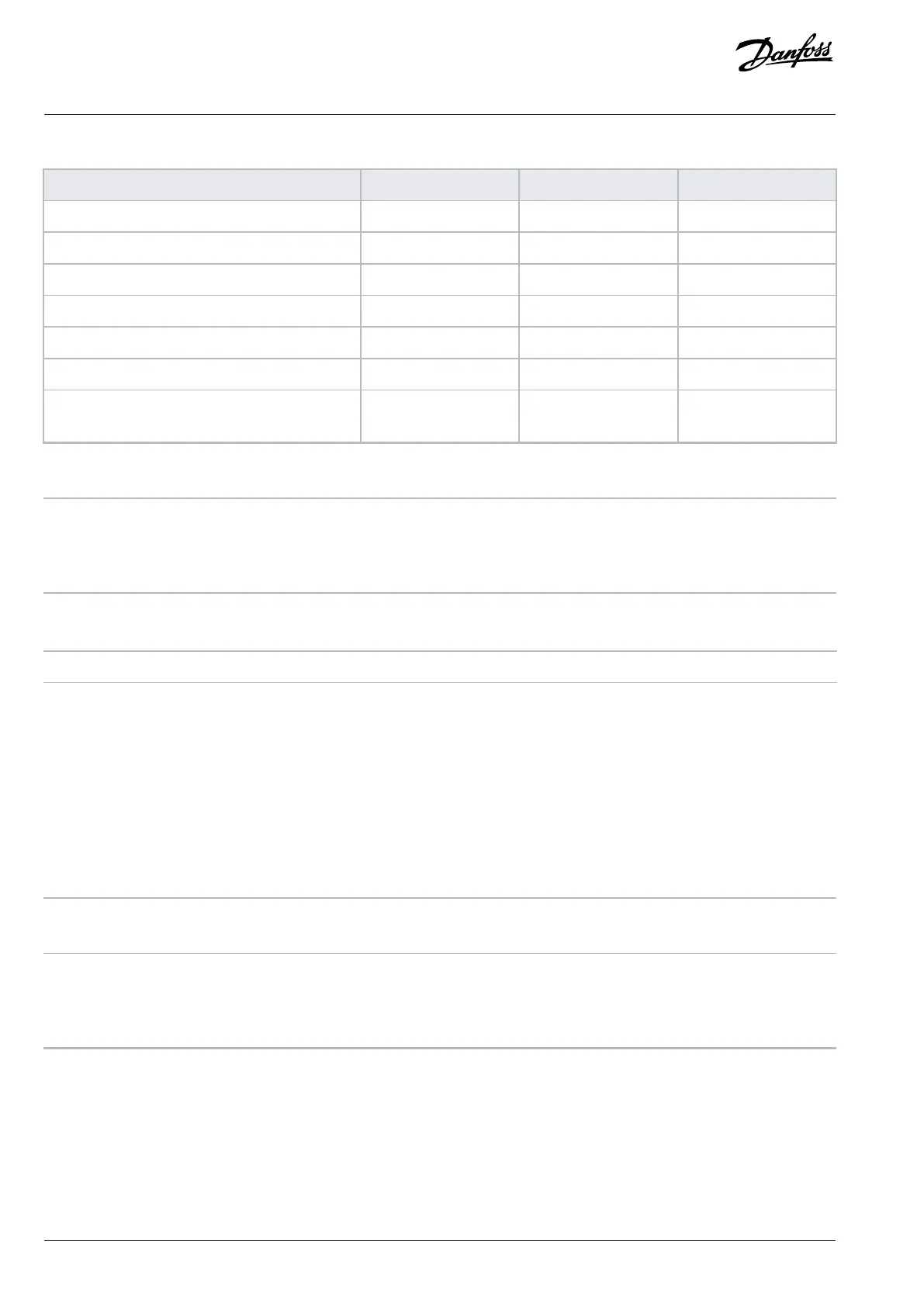
Table 12: Active Parameters (continued)
Parameter 1-10 Motor Construction [0] Asynchron [1] PM, non salient SPM [3] PM, salient IPM
Parameter 40-50 Flux Sensorless Model Shift x x x
Parameter 40-51 Flux Sensorless Corr. Gain x x x
Parameter 40-52 Speed PID Anti Windup Gain x x x
Parameter 40-53 Current PID Anti Windup Gain x x x
Parameter 40-54 Flux /w Feedback Dynamic Mode x x x
Parameter 40-56 Rotor Position Estimation Gain x x
Parameter 40-57 Low Speed Flux Compensation
Gain
x x x
1-10 Motor Construction
Default value: [0] Asynchron Parameter type: Option
Setup: All setups Conversion index: –
Data type: Uint8 Change during operation: False
Select the motor design type.
Option Name Description
[0] Asynchron For asynchronous motors.
[1] PM, non salient SPM For permanent magnet (PM) motors with
surface-mounted (non-salient) magnets.
Refer to parameter 1-14 Damping Gain to
parameter 1-17 Voltage Filter Time Const.
for details about optimizing the motor
operation.
[3] PM, salient IPM For permanent magnet (PM) motors with
interior (salient) magnets.
1-14 Damping Gain
Default value: 120% Parameter type: Range (0–500%)
Setup: All setups Conversion index: 0
Data type: Int16 Change during operation: True
The parameter stabilizes the PM motor to ensure smooth and stable operation. The value of damping gain controls the dynamic
performance of the PM motor. Low damping gain results in high dynamic performance and a high value results in a low dynamic
performance. The dynamic performance is related to the motor data and load type. If the damping gain is too high or too low, the
control becomes unstable.
56 | Danfoss A/S © 2024.01 AU275649936274en-001401 / 130R0507
Programming Guide | VLT® AutomationDrive FC 360

 Loading...
Loading...











