Programming Guide | VLT® AutomationDrive FC 360
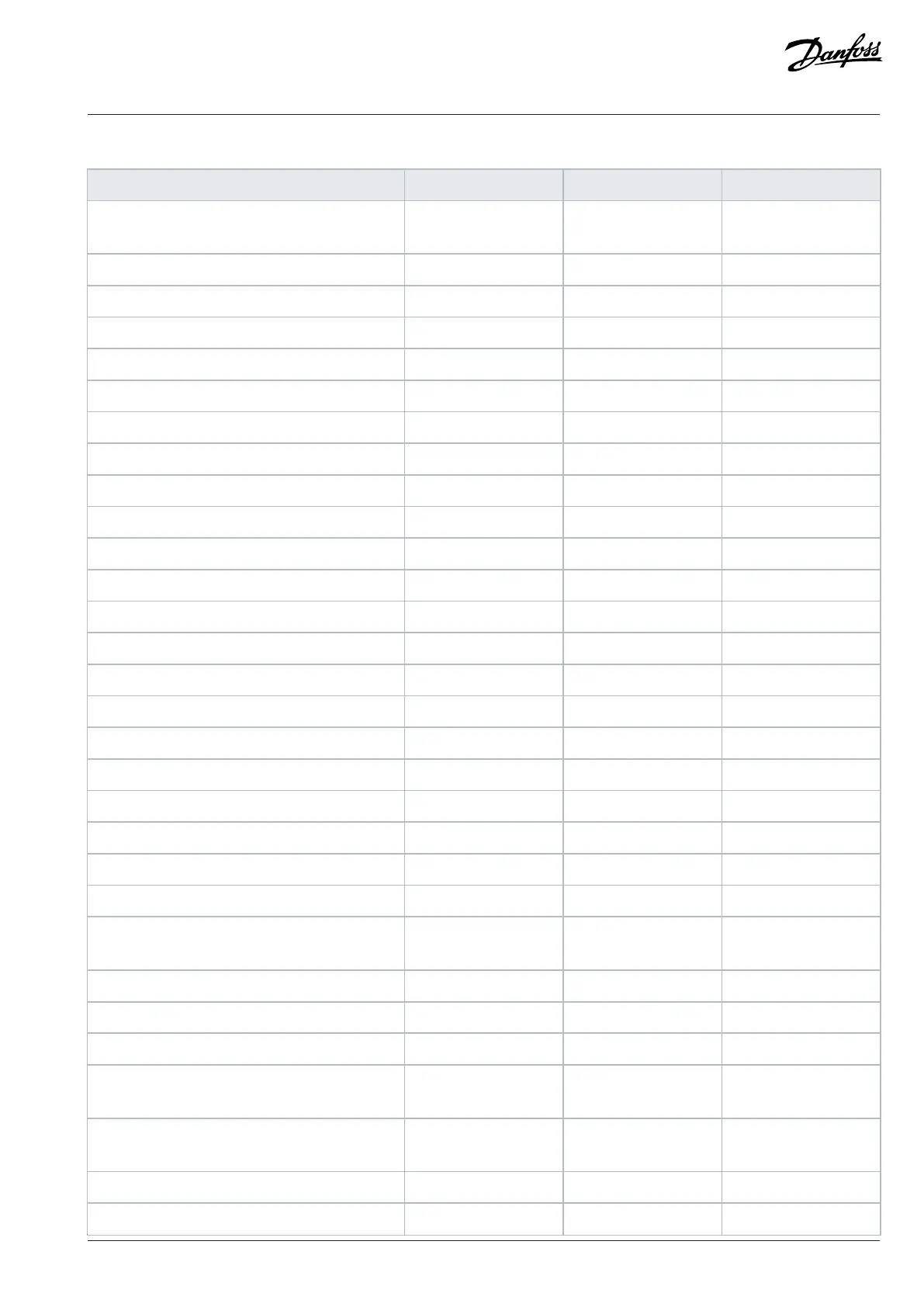
Table 12: Active Parameters (continued)
Parameter 1-10 Motor Construction [0] Asynchron [1] PM, non salient SPM [3] PM, salient IPM
Parameter 7-09 Speed PID Error Correction w/
Ramp
x x x
Parameter 7-10 Torque PI Feedback Source x x x
Parameter 7-12 Torque PID Proportional Gain x x x
Parameter 7-13 Torque PID Integration Time x x x
Parameter 7-16 Torque PI Lowpass Filter Time x x x
Parameter 7-19 Current Controller Rise Time x x x
Parameter 7-28 Low Speed PID Proportional Gain x x x
Parameter 7-29 Low Speed PID Integral Time x x x
Parameter 14-01 Switching Frequency x x x
Parameter 14-03 Overmodulation x x x
Parameter 14-07 Dead Time Compensation Level x x x
Parameter 14-08 Damping Gain Factor x x x
Parameter 14-09 Dead Time Bias Current Level x x x
Parameter 14-10 Mains Failure x
Parameter 14-11 Mains Fault Voltage Level x
Parameter 14-12 Function at Mains Imbalance x x x
Parameter 14-27 Action At Inverter Fault x x x
Parameter 14-37 Fieldweakening Speed x x x
Parameter 14-38 Field Weakening Controller Gain x x x
Parameter 14-40 VT Level x
Parameter 14-41 AEO Minimum Magnetisation x
Parameter 14-42 Minimum AEO Frequency x x
Parameter 14-44 d-axis current optimization for
IPM
x x
Parameter 14-50 RFI Filter x x x
Parameter 14-51 DC-Link Voltage Compensation x x x
Parameter 14-55 Output Filter x x x
Parameter 14-64 Dead Time Compensation Zero
Current Level
x x x
Parameter 14-65 Speed Derate Dead Time
Compensation
x x x
Parameter 30-22 Locked Rotor Protection x x
Parameter 30-23 Locked Rotor Detection Time [s] x x
Danfoss A/S © 2024.01 AU275649936274en-001401 / 130R0507 | 55

 Loading...
Loading...











