3.7 Address Configuration
A3-67
ME0384-4A
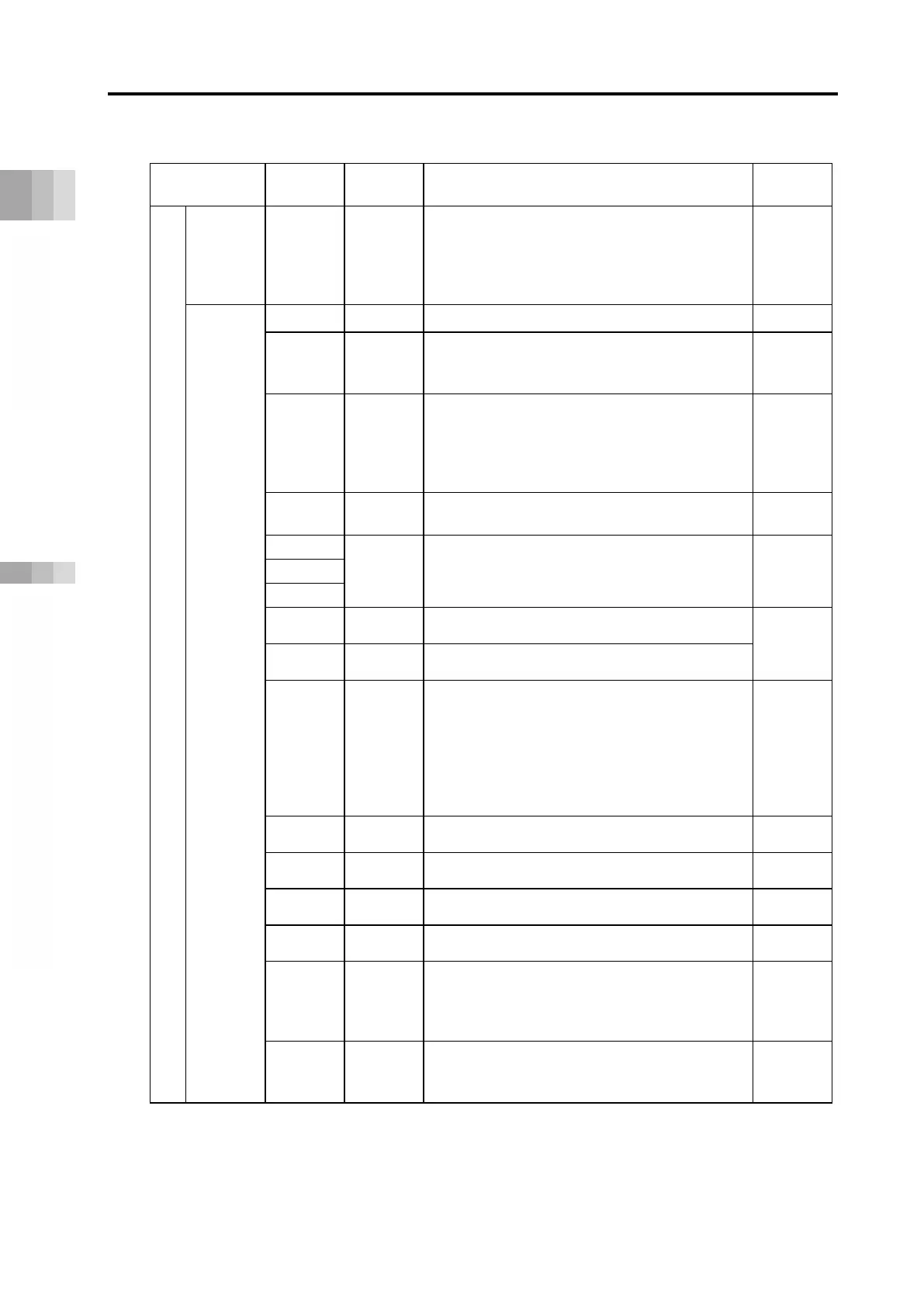
[I/O Signal List]
Direct numerical control mode
(ON = corresponding bit is "1", OFF = corresponding bit is "0")
Signal type Bit
Content Details
PLC output
Pushing
current
limit
value
16-bit
data
-
Set the current limit value in push-motion
operation. (Unit %)
The setting range is 0 to 200%, where 255 =
100% and 510 = 200%.
Ex ) To set to 50%, specify 255 × 50% = 127.
Page
A3-121
Control
signal
b14 INC
[OFF: absolute position command,
ON: relative position command]
3.8 [20]
b13 DIR
[ON : travel in home reverse direction,
OFF: travel in home direction]
(Note) This signal is enabled when CON
push-motion method is selected.
3.8 [17]
b12 PUSH
Push-motion specification
[ON: push-motion operation, OFF: positioning operation]
3.8 [16]
- Not available -
b8 JOG+
+Jog [ON: travel in home reverse direction, OFF: Stop]
3.8 [10]
b7 JOG-
-Jog [ON: travel in home direction, OFF: Stop]
b6 JVEL
Jog velocity/inching distance switchover
[OFF: Uses RCON parameter No. 26 "Jog
velocity" and No. 48 "Inching setting value"
ON: Uses RCON parameter No. 47 "Jog velocity
2 setting value or command vel. setting
value"
(Note 1)
and No. 49 "Inching 2 setting
3.8 [11]
b5 JISL
Jog/Inching switching [ON: Inching, OFF: Jog]
3.8 [12]
b4 SON
Servo ON command [ON: Servo ON, OFF: Servo OFF]
3.8 [5]
b3 RES Reset [ON to execute reset] 3.8 [4]
b2 STP Pausing [ON: Pause, OFF: Pause cancel] 3.8 [8]
b1 HOME
[ON to execute home return command. Even
when turned OFF midway, it will run until
3.8 [6]
b0 CSTR
[ON to execute travel command. Even when
turned OFF midway, it will run until completion]
3.8 [7]
Note 1: When command speed setting = 0: operates at the value of RCON parameter No. 47
"PIO Jog velocity 2". When command speed setting ≠ 0: operates at the command
speed set value.

 Loading...
Loading...




