3.7 Address Configuration
A3-68
ME0384-4A
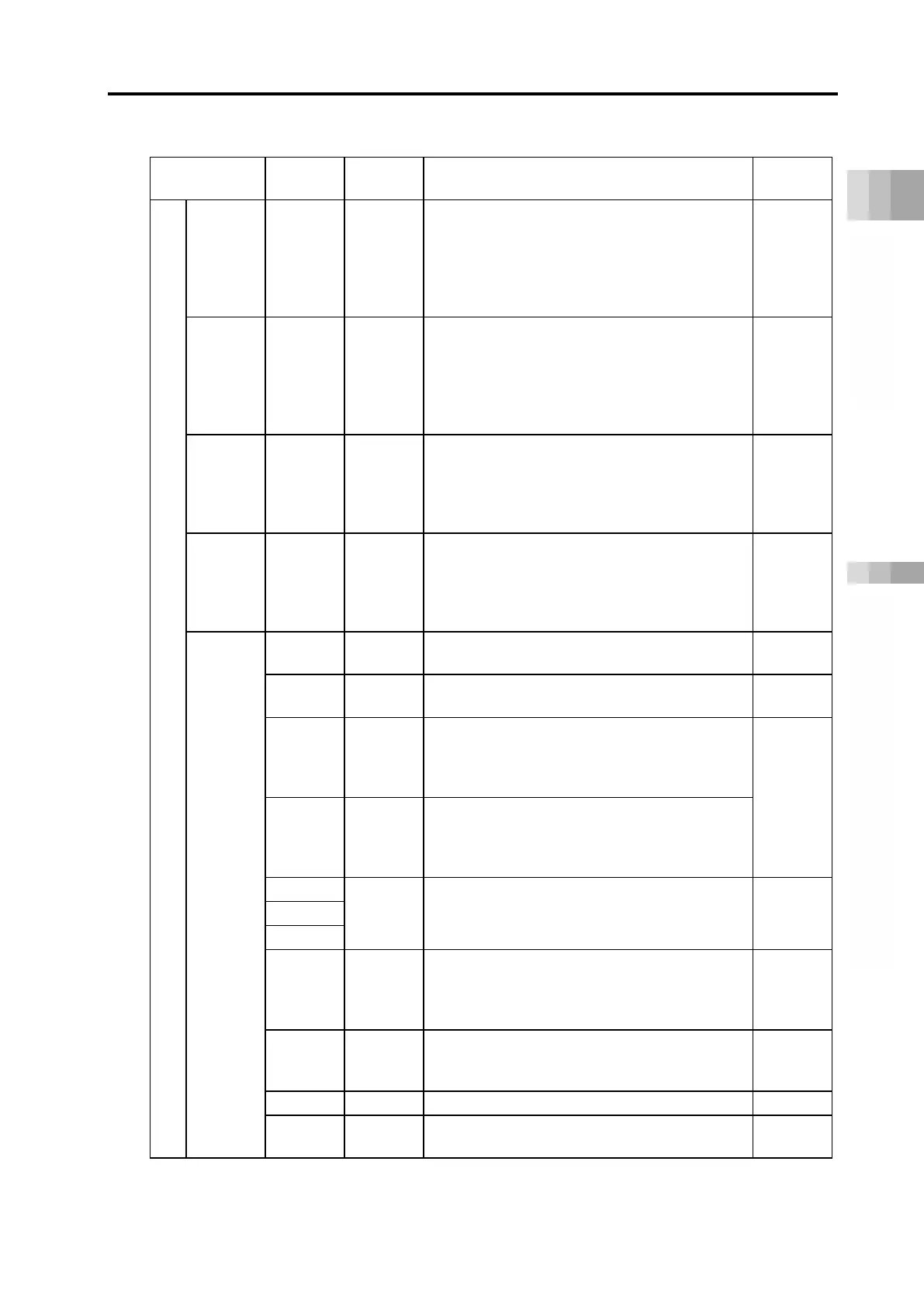
[I/O Signal List]
Direct numerical control mode
(ON = corresponding bit is "1", OFF = corresponding bit is "0")
Signal type Bit
Content Details
PLC input
Present
position
data
32-bit
data
-
Present position data is output in 32-bit signed
integer (unit: 0.01mm and 0.001deg for DD motor).
Ex) For +25.4 mm, it will be 2540.
● For negative numbers, 2ʼs complement
will be displayed when reading is made in
Page
A3-121
Present
current
value
(Note 1)
32-bit
data
-
Motor command current value data is output in 32-
bit signed integer (unit: mA).
Ex) For +1A (+1000mA), it will be 1000.
● For negative numbers, 2ʼs complement
will be displayed when reading is made in
Page
A3-121
Present
speed
16-bit
data
-
Output in 16-bit integer (unit: 1.0 mm/s or 0.1
mm/s). Change the unit using the gateway
parameter configuration tool.
Ex) For 200mm/s, 200 will be displayed when
Page
A3-121
Alarm
code
16-bit
data
-
Outputs the currently generated alarm code.
(ALM is ON.)
For the alarm contents, refer to "Maintenance
Section Chapter 2 Troubleshooting". Note that
this is not the same as the simple alarm code.
Page
A3-121
Status
signal
b15 EMGS
Emergency stop status
[ON: Emergency stop status]
3.8 [2]
b14 CRDY
Controller ready
[ON: Ready]
3.8 [1]
b13 ZONE2
[ON : Present position is within the setting
range of zone 2,
OFF:
Limit position is not within the setting range]
3.8 [9]
b12 ZONE1
[ON : Present position is within the setting
range of zone 1,
OFF:
Limit position is not within the setting range]
- Not available. -
b8 MEND
[ON :
When in positioning complete, push-motion
complete or idling status after travel,
OFF: Travel start or servo OFF]
3.8 [19]
b7 ALML
Minor malfunction alarm output
[ON: When overload warning or message
3.8 [21]
b5 PSFL
Push-motion operation contactless
[ON: push-motion operation completed contactless]
3.8 [18]
Note 1
The present current value should be the command current value for the stepper motor and be the
feedback current value for the AC servomotor (including AC servomotor connected to SCON-CB).

 Loading...
Loading...




