6.1 Parameter
B6-35
ME0384-4A
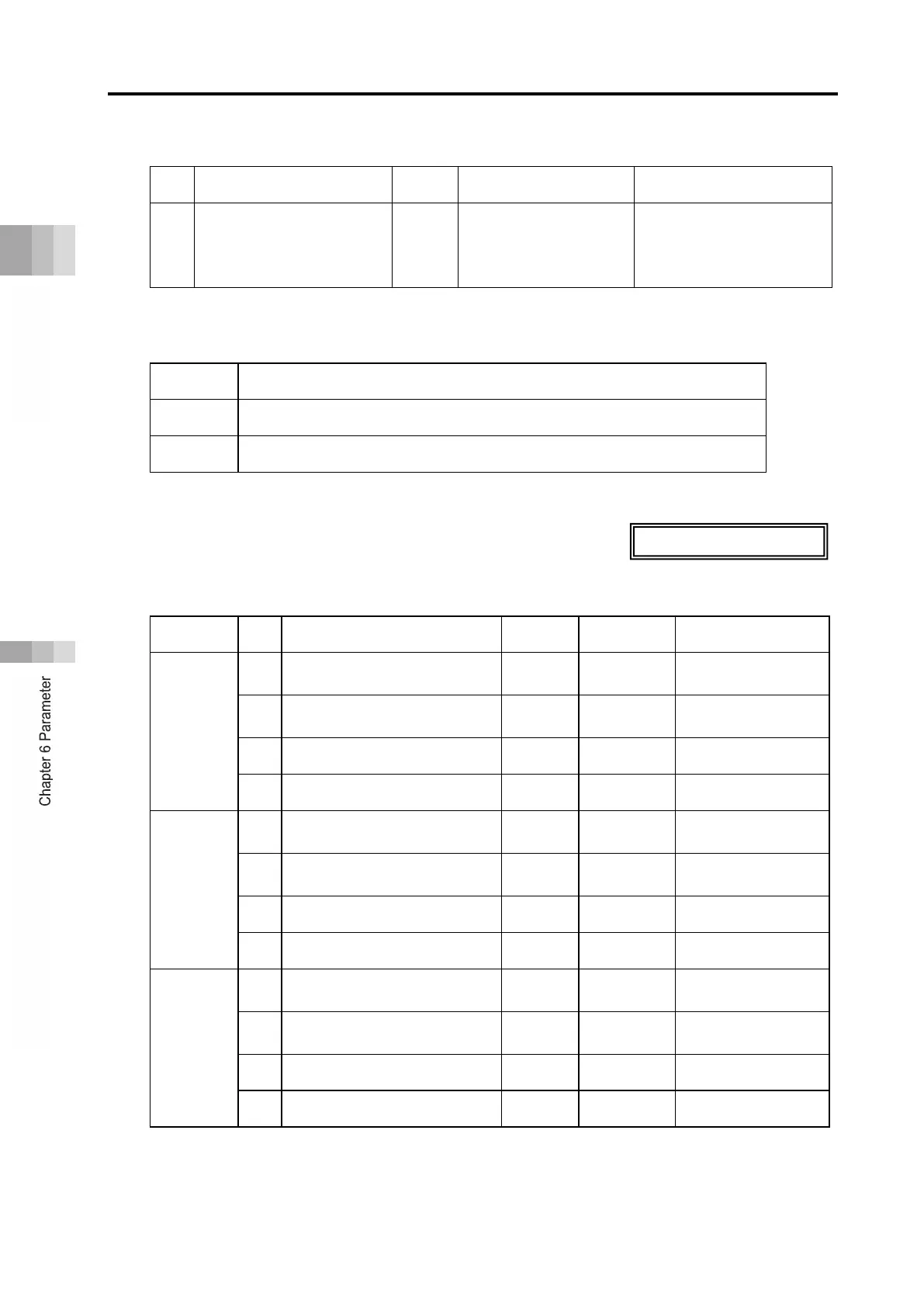
[Current Limit Value During Contactless Push Stop (Parameter No. 91)]
No. Name Unit Input range
Default initial value setting
91
Current limit value during
contactless push stop
-
0: Current limit value
during stop
1: Current limit value
during push
0
Select current limit value during stop when contactless push has occurred.
Servo will be locked by this current limit value until the next travel command.
Set value Content
0 Uses Current Limit During Positioning Stop (Parameter No. 12).
1 Uses the current limit value during push-motion set in the position table.
[Damping Characteristics Coefficient 1, 2 / Natural Frequency / Notch Filter Gain
(Parameters No. 97 to 108)]
No. Name Unit
Input range
Default initial value setting
Vibration
Control
Parameters
Set 1
97
Damping characteristics
coefficient 1
- 0 to 1,000 10
98
Damping characteristics
coefficient 2
- 0 to 1,000 1,000
99 Natural frequency
1/1,000Hz 500 to 30,000
10,000
100 Notch filter gain - 1 to 20,000 9,990
Vibration
Control
Parameters
Set 2
101
Damping characteristics
coefficient 1
- 0 to 1,000 10
102
Damping characteristics
coefficient 2
- 0 to 1,000 1,000
103 Natural frequency
1/1,000Hz 500 to 30,000
10,000
104 Notch filter gain - 1 to 20,000 9,990
Vibration
Control
Parameters
Set 3
105
Damping characteristics
coefficient 1
- 0 to 1,000 10
106
Damping characteristics
coefficient 2
- 0 to 1,000 1,000
107 Natural frequency
1/1,000Hz 500 to 30,000
10,000
108 Notch filter gain - 1 to 20,000 9,990
A parameter dedicated to vibration damping control.
For details, refer to "6.2 Various Functions/Vibration damping control function (page B6-65)".
AC servo motor specification only
 Loading...
Loading...





