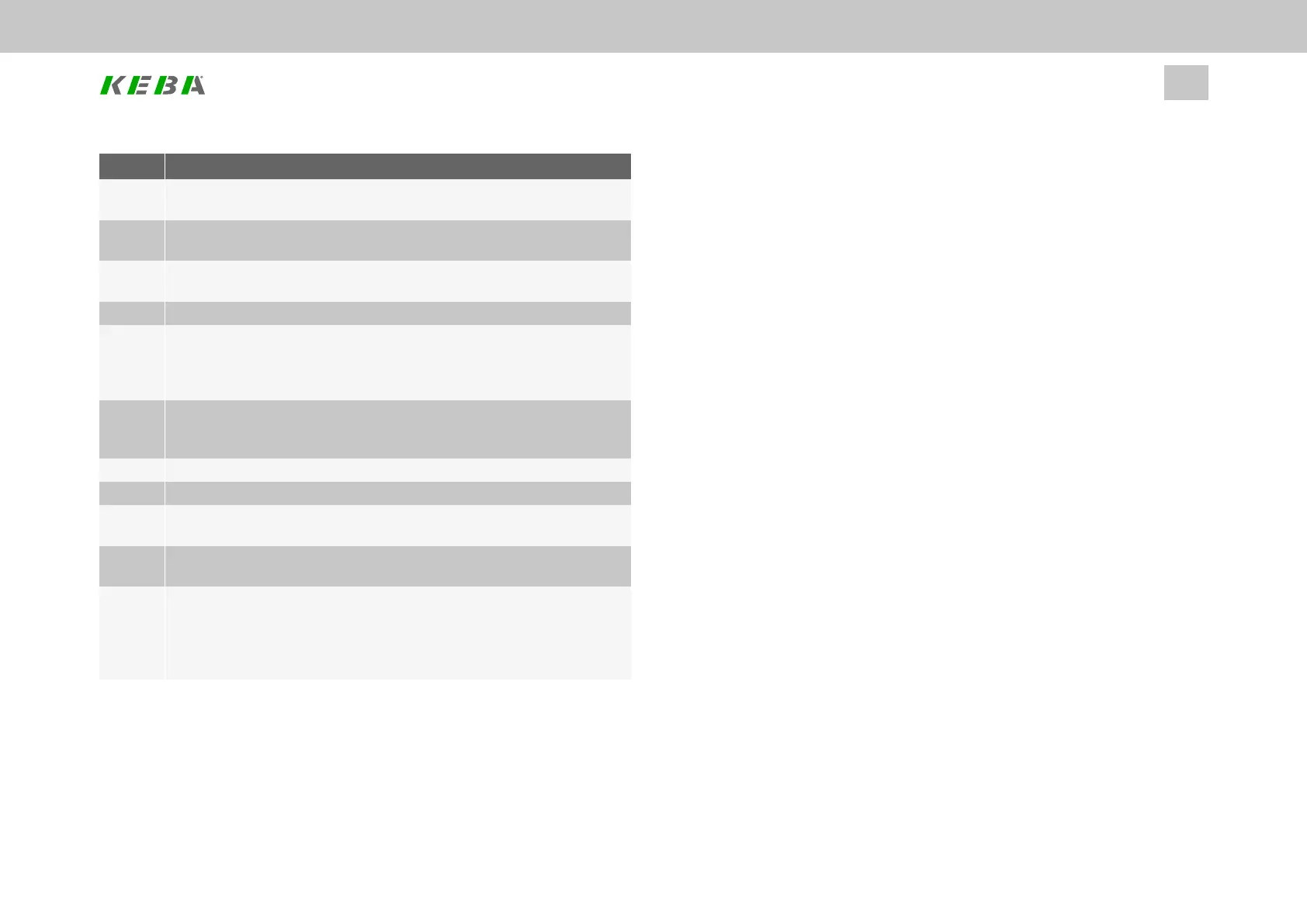
Step Action
1.
UseP 530 - ENC_Encoder1SeltoselectthechannelforSercos:1st
encoder
2.
UseP 531 - ENC_Encoder2SeltoselectthechannelforSercos:2nd
encoder
3.
Selectionoftheencoderwhoseactualpositionvalueistobechanged,
withP 590 - ENC_ACOR_Sel
4. EnterinterpolationpointpitchinP 593 - ENC_ACOR_PosDelta
5.
Thecorrectionvaluesaredeterminedusingareferencemeasurement
system(e.g.laserinterferometer).Theinterpolationpointsforthevarious
directionswithinthedesiredcorrectionrangeareapproachedoneafter
anotherandthecorrespondingpositionerrorismeasured.
6.
Theinterpolationpoint-specificcorrectionvaluesareenteredmanuallyin
tablesP 595 - ENC_ACOR_VnegTab(neg.direction)andP 596 - ENC_
ACOR_VposTab(pos.direction).
7. Savevalues
8. Restartthedevice
9.
P 592 - ENC_ACOR_PosEndnowshowsthepositionendvalueofthe
correctionrange.
10.
Startcontrol(inpositioncontrolexecutehoming)andthenmovetoany
position.
11.
ThemomentarycorrectionvalueiswrittentoP 594 - ENC_ACOR_Val.
Thisvalueissubtractedfromtheapproachedpositionvalue.Thisapplies
toallpositions.Endposition=interpolationpointpitchmultipliedby
numberofinterpolationpoints(tablevalues)+startposition(onlyifstart
position≠0).
Table 6.37: Axis correction procedure
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
104
6 Encoder
Position control
The direction of movement is produced when the time-related change in position
reference (speed pre-control value) has exceeded the amount of the standstill
window in the positive or negative direction.
Speed control
The direction of movement is produced when the speed reference has exceeded the
amount of the standstill window in the positive or negative direction.