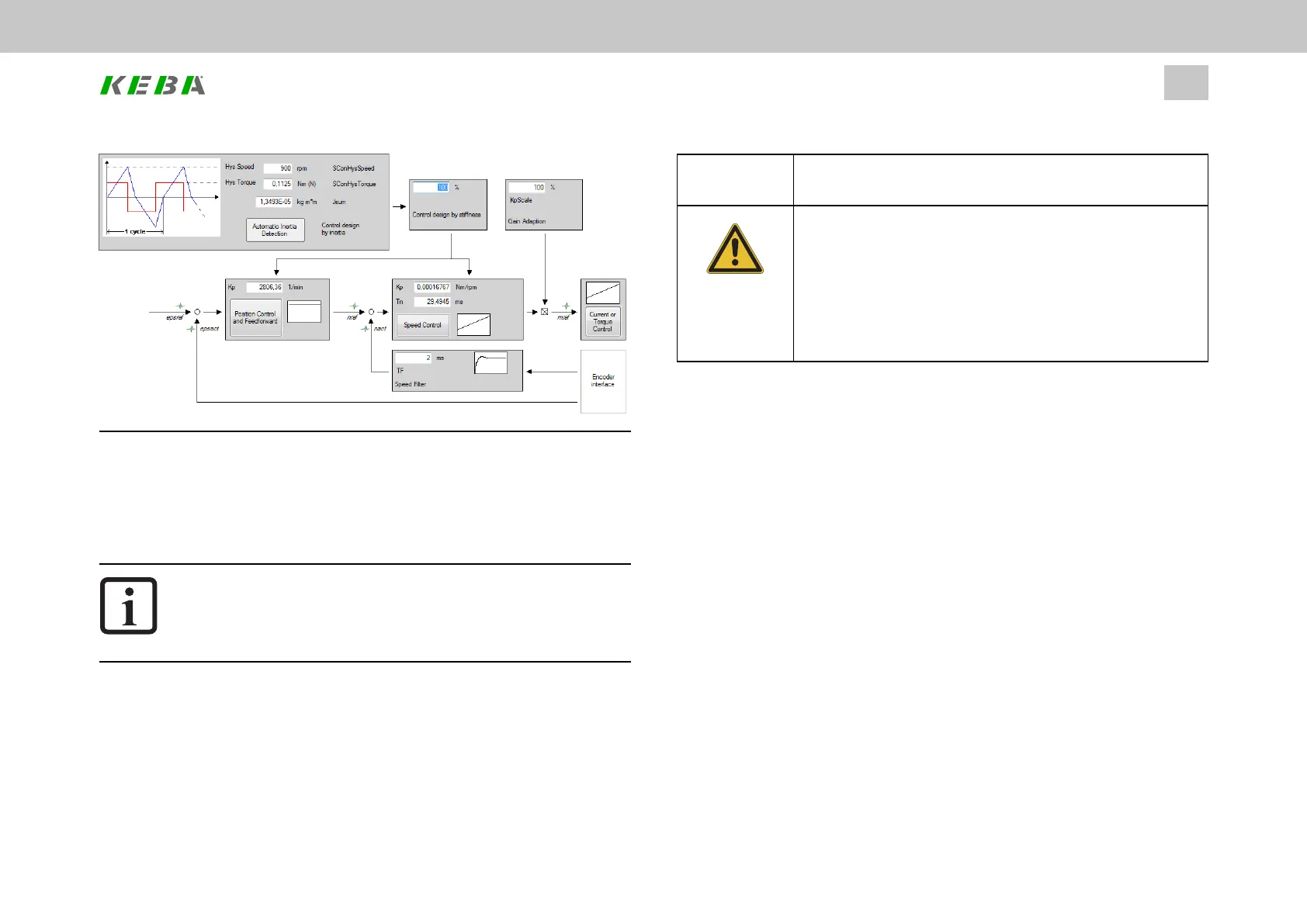
Image 7.3: “Motor control basic settings” screen
7.2.1.1Adjustmentofthemassinertia
If the mass inertia value is not known, the wizard can be used to determine it (see
Section "Automatic inertia detection" on page 114).
NOTE
l
While the mass inertia is being determined the motor executes
movements. There is a risk that the system and the motor may be
destroyed.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
113
7 Control
CAUTION! Your system/motor may be damaged if put into operation in
an uncontrolled or inappropriate manner.
Improper conduct can cause damage to your system /
machine.
l Beforethe“Start”step,makeabsolutelysurethatavalid
setpointhasbeenentered,astheconfiguredsetpoint
willbeimmediatelytransmittedtothemotorafterthe
motorcontrolfunctionstarts,whichmayresultinthe
motoracceleratingunexpectedly.
7.2.1.2Adaptationtotherigidityofthedrivetrain
The settings for the speed and position control with feed forward control are
determined automatically by setting the rigidity. The rigidity is stated in percent in the
wizard.
l Thesetting<100%reducesthedynamicperformanceofthecontroller
setting(e.g.foratoothedbeltdrive).
l Thesetting>100%increasesthedynamicperformanceofthecontroller
setting(lowplayandelasticity).
The speed controller gain is scaled separately using the percentage value KP Scale.
The damping of the control is affected by the speed filter.
Useful settings are:
l Resolver:1-2ms
l SinCosencoder(low-track):0.5-1ms
l SinCosencoder(highresolution):0.2-0.6ms