Adaptation of parameters
Acceleration and braking phases generate a variation which the speed control has
to balance out. With speed pre-control the necessary acceleration or braking
moment determined from the change in speed over time is applied to the output of
the speed controller.
If the travel range is not limited, it is advisable to optimize the speed controller by
means of step responses. In this, the motor model must be adapted precisely to the
individual motor. In the standard motor data set, the speed controller is preset for a
moderately stiff mechanical system. The speed controller may need to be adjusted to
the moment of inertia and the rigidity of the mechanism.
All parameters take effect online. The scaling parameter P322[0] - CON_SCON_
KpScale is transferred in defined real time (according to the speed controller
sampling time).
The following steps are needed to set the speed control loop depending on the
application:
No. Action
1
Adaptthespeedcontrollergaintotheexistingexternalmassinertia.For
this,eithertheknownmomentofinertiafromthemotordatacanbeused
directlyortheautomaticmassinertiadefinitionfunctionintheMotor
Identificationsubjectareacanbeused.
2
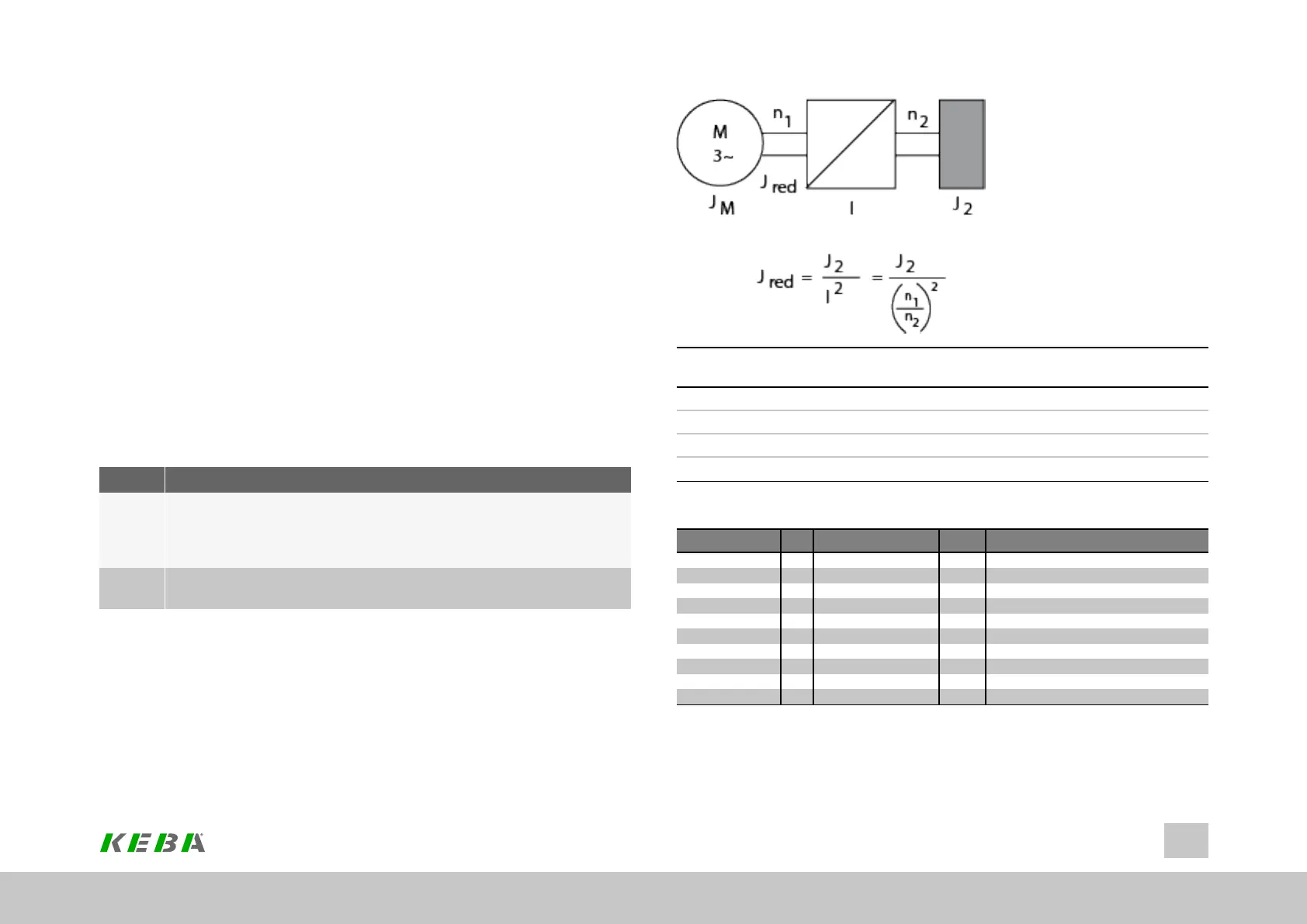
Ifthesystem'smomentofinertiaisdefinedmanually,itmustbereduced
tothemotor.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
134
7 Control
Image 7.21: Relevant variables
J
M
Momentofinertiaofmotor
J
red
Reducedmomentofinertiaofsystem
i
Geartransmissionratiofactor
J
2
Reduced moment of inertia
Legend for “Relevant variables”
ID Index Name Unit Description
2695 CON_SCON_ScaleTF Scalingfiltertimeconstant
2695 0 ScaleMaxSpeedFil ms Speedscalingfiltertimeconstant
2695 1 ScaleMaxTorqueFil ms Torquescalingfiltertimeconstant
320 0 CON_SCON_Kp Nm/rpm Speedcontrolgain
321 0 CON_SCON_Tn ms Speedcontrolintegrationtimeconstant
322 0 CON_SCON_KpScale % Speedcontrolgainscalingfactor
351 CON_SCALC_TF Speedcalculationfiltertimeconstant
351 0 CON_SCALC_TF ms Filtertimeconst.speedcontrol
351 1 CON_SCALC_TF ms Filtertimeconst.fieldmodel(hydraulic)
351 2 CON_SCALC_TF ms Filtertimeconst.speedfrompositioncontrol
Table 7.12: “Speed controller” parameter