l Anothercriterionforareliableknowledgeofmassinertiaisfunctioning
torquefeedforwardcontrol(seeSection"Pre-control"onpage142).Multiply
thecurrentlyconfiguredvalueofP 1516[0] - SCD_JSumbyP 376 - CON_
IP_TFFScaleandsetP 376 - CON_IP_TFFScalebackto100%.
l SetP 350[0] - SEL_ObserverMethod=OBS1(1)andP 354[0] - CON_
SCALC_ObsDesignAssi=DR(2).
l Startthecontrol.
The setting parameter for the observer is the time constant P 353[0] - Tf. Use twice
the time constant of the previously used speed filter P 351[0] - CON_SCALC_Tf as
an initial value. Configuration is also a compromise between input signal smoothing
and phase shift in the control circuit. However, the observer does not have such a
great effect on phase shift in the speed control circuit as a filter.
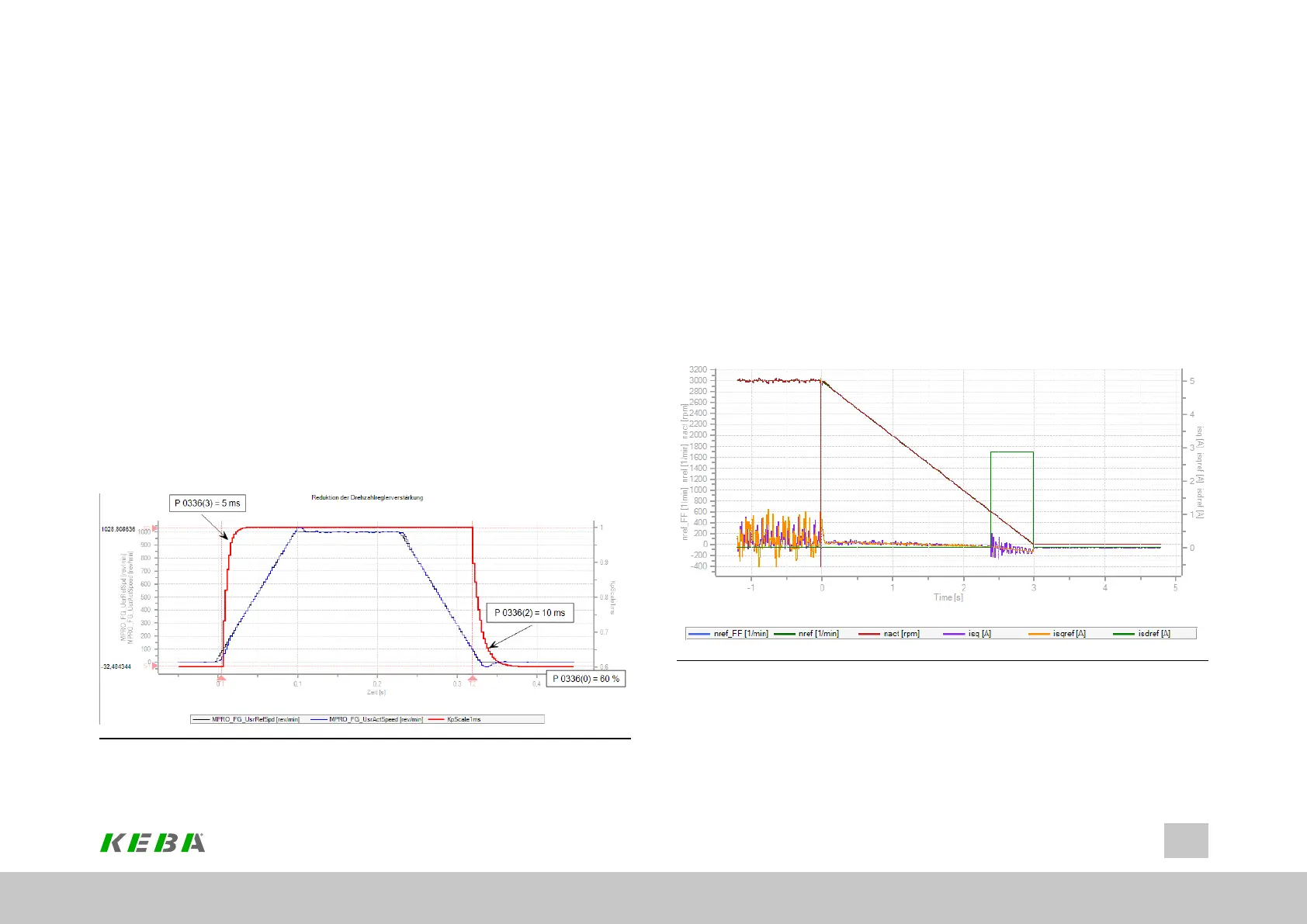
7.4.1.2Reductionofgainatlowspeeds.
With speed controllers set to be very dynamic, undesirable oscillation of the speed
controller may occur at low speeds or at zero speed. An appropriate setting of P336
- CON_SCON_KpScaleSpeedZero reduces this tendency to oscillate.
Image 7.23: Reduction of gain at low speeds.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
136
7 Control
7.4.1.3Quickstopwithoutsensor
In the event of a wire break on the encoder system the drive is shut down in
sensorless mode on the preset quick-stop ramp (see Section "Error reactions" on
page 339 and Section "Stop ramps" on page 251). Due to the lack of dynamism at
low speeds, the sensorless control is very "imprecise". To enable the drive
nevertheless to be run down smoothly to speed 0, as from the speed threshold
parameterized in P355[0] - LowSpeedLimit the controller switches to a
current/frequency (IF) control. For stabilization, an additional, cumulative d-current
must be injected that can be set via the P355[1] - d-current Injection parameter. The
speed controller gain is reduced by the factor P355[2] - SpeedControlGainScale.
Image 7.24: Quick stop without sensor