Image 7.31: “Position control” screen
ID Index Name Unit Description
386 CON_SCON_TFric Dryfrictioncomp.,normalizedtomotorrated
torque
386 0 CON_SCON_TFric % Frictiontorquecompensationsettings
Thetablevalues0to2arealwaysapplicable
whiletablevalues3to4onlytakeeffectinthe
accelerationrange.
386 1 CON_SCON_TFric % Compensationvalue1
386 2 CON_SCON_TFric % Compensationvalue2
386 3 CON_SCON_TFric % Compensationvalue3
386 4 CON_SCON_TFric % Compensationvalue4
387 CON_SCON_TFricSpeed Frictiontorquecompensation:Speedlimits
387 0 CON_SCON_TFricSpeed rpm Frictiontorquecompensation:Speedlimits
387 1 CON_SCON_TFricSpeed rpm Frictiontorquecompensation:Speedlimits
387 2 CON_SCON_TFricSpeed rpm Frictiontorquecompensation:Speedlimits
387 3 CON_SCON_TFricSpeed rpm Frictiontorquecompensation:Speedlimits
387 4 CON_SCON_TFricSpeed rpm Frictiontorquecompensation:Speedlimits
388 0 CON_SCON_TConst % Frictiontorquecompensation:Constant
(independentofdirection)
Table 7.22: “Position controller - Feed-forward control” parameters (friction torque
compensation extract)
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
144
7 Control
The screen view can only be used to configure P386[0] - CON_SCON_TFric. In
order to access all the friction torque compensation parameters, please switch to the
list view by using the “CTRL + L” key combination.
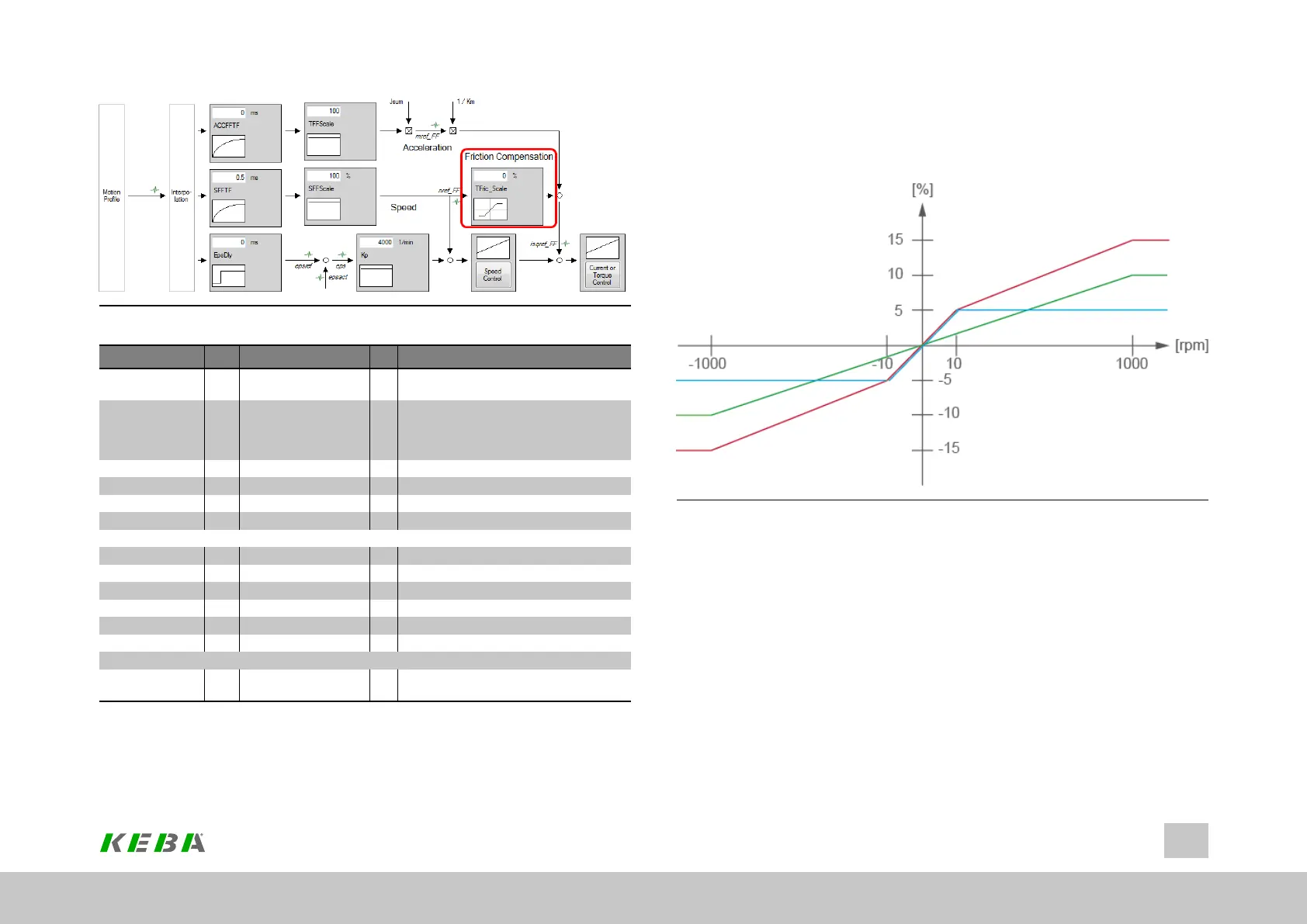
Image 7.32: Friction torque compensation for position control
The friction torque compensation is derived from the forward-fed speed nref_FF. It
has five basic functions, each having the Torque and Speed parameters. The basic
function runs proportionally up to the point (Speed, Torque), the function value
remains constant at higher speeds.