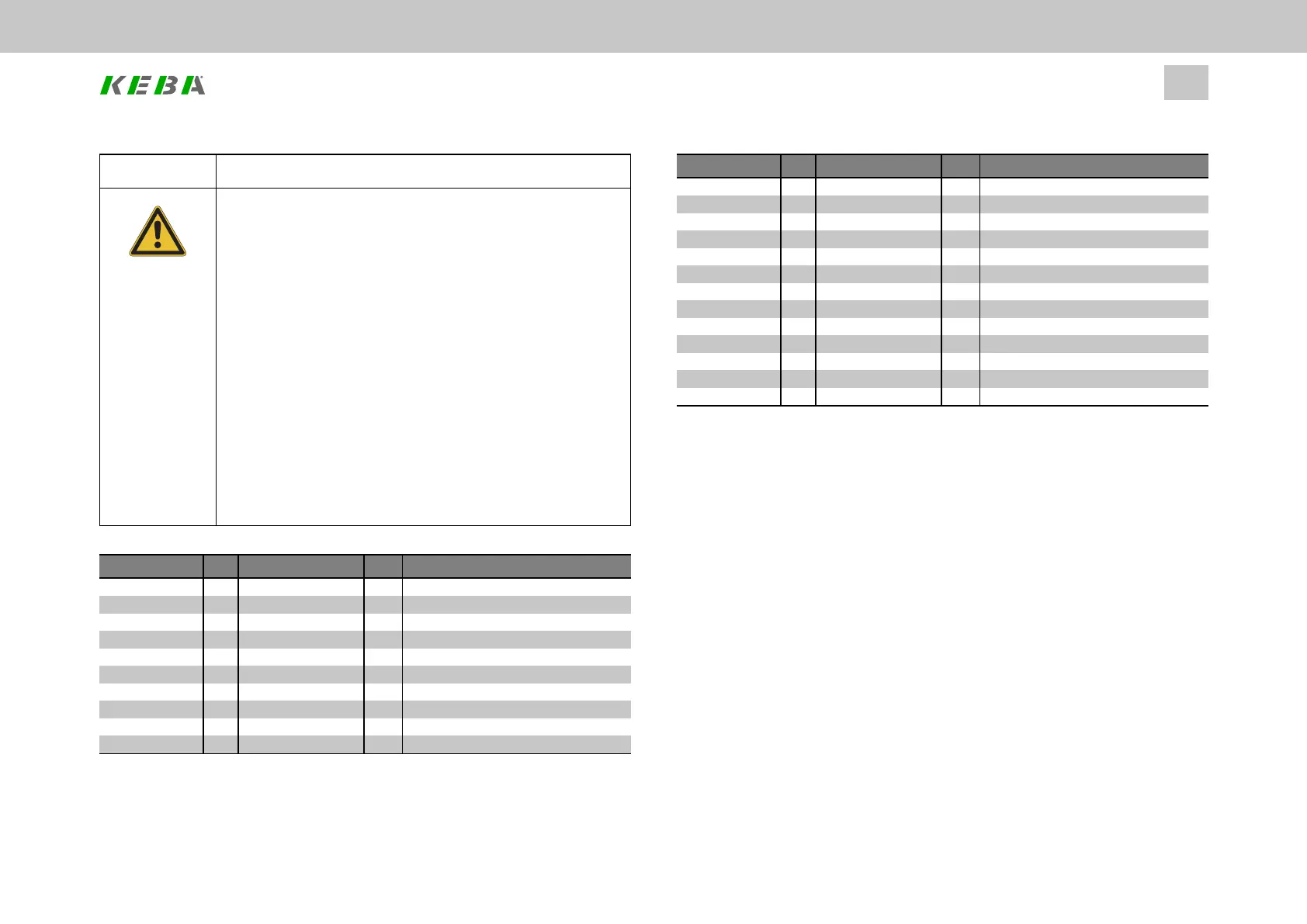
CAUTION! Damage to the device as a result of incorrect operation!
Failure to exercise caution or follow proper working
procedures may result in damage to the device.
l Themotorcanmovesuddenlyduringtheauto
commutation.Themechanismcoupledmustbe
designedforthismovement.
l Ifthecommutationpositionisnotdeterminedcorrectly,
themotorwillaccelerateinanuncontrolledmanner,
Thiscanleadtodamagetothemechanicalsystem.
l Makesuretocarefullytesttheautocommutation
function.Varythestartposition.Evenif
autocommutationhasnotbeenperformed,thedrivecan
be“madetorotate”inupto50%ofcases.
l Enablespeedtrackingerrormonitoring(P 744[0] -
SDiffMax,Section"Speed-/velocitylimits"onpage
326).Thismonitoringfunctionprovidesextensive
protectionagainstuncontrolledmovement.
ID Index Name / Setting Unit Description
365 0 CON_ICOM_AutoOn autorecommutationafterselectedevent
366 0 CON_ICOM_RefSpeed rpm commutationdetection:scalingofcontrolgain
390 0 CON_ICOM Autocommutation:Controlwordforselection
Off(0) Functiondisabled
IENCC(1) Currentinjection
LHMES(2) Saturationofinductanceevaluated
IECSC (3) Not yet implemented
IECON(4) Currentinjection,minimizedmovement
HALLS (5) Not yet implemented
HALLSDIGITAL(6) DigitalHallsensor
Table 7.36: “Auto commutation” parameters
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
159
7 Control
ID Index Name / Setting Unit Description
HALLSDIGITAL2(7) DigitalHallsensor(alternateprocess)
391 0 CON_ICOM_KpScale % commutationdetection:scalingofcontrolgain
392 CON_ICOM_Time commutationdetection:times
392 0 CON_ICOM_Time ms
392 1 CON_ICOM_Time ms
392 2 CON_ICOM_Time ms
392 3 CON_ICOM_Time ms
393 CON_ICOM_Current commutationdetection:currents
393 0 CON_ICOM_Current A
393 1 CON_ICOM_Current A
394 CON_ICOM_Check Monitoringautocommutation
394 0 LIMIT degree Autocommutation:Angleerrorlimit
394 1 ActVal degree Autocommutation:Angleerroractualvalue
Table 7.36: “Auto commutation” parameters (continue)