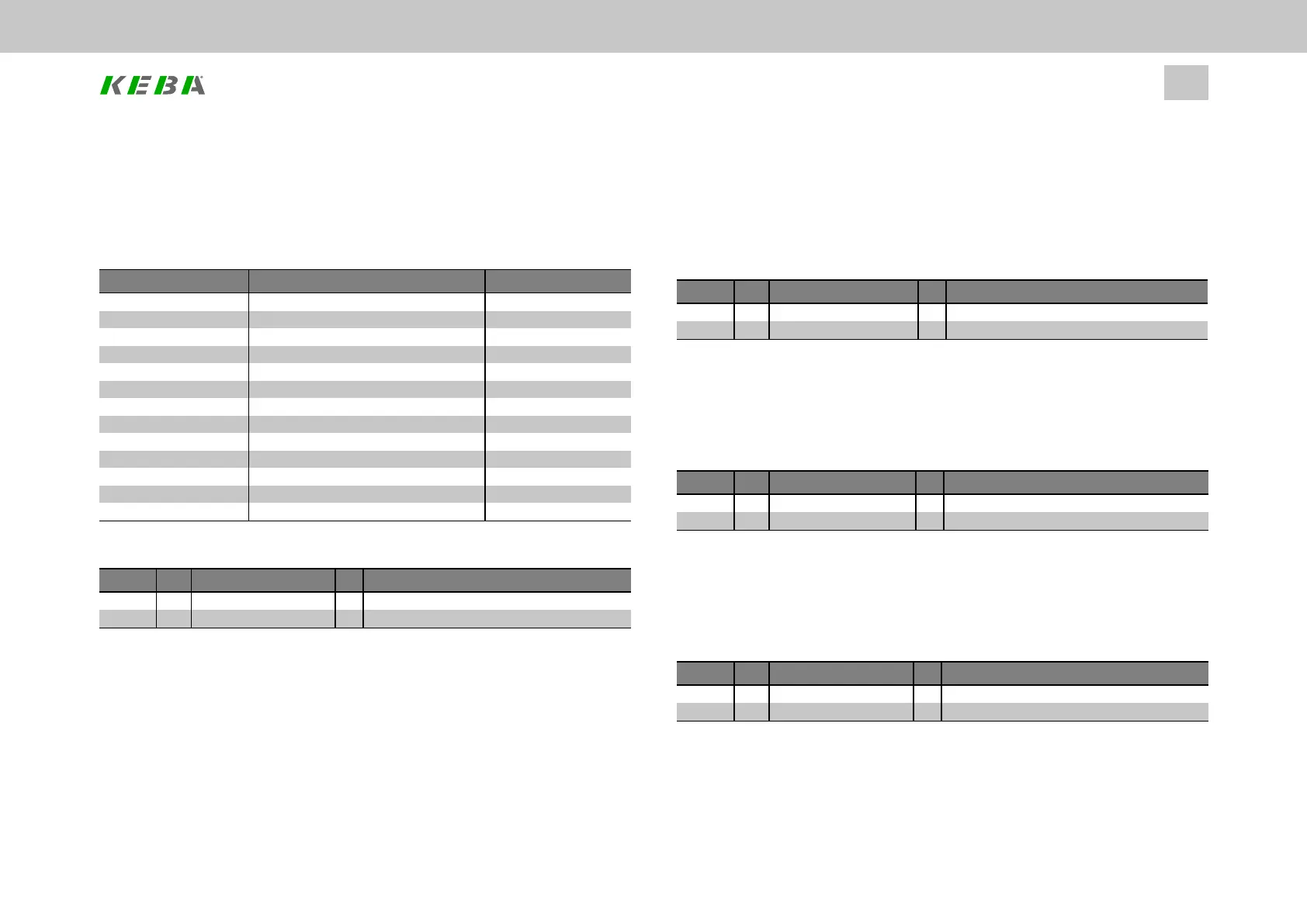
Using the scaling parameter Hyd_Limit (P 2872) allows the respective currently
active limit to be scaled for each motion block. This makes it possible to limit each
individual process. The scaling is switched over dynamically with the respective
control mode that is set. The following table shows for which control modes the
scaling function is implemented.
Control mode Pressure limit Volumetric flow rate limit
NPumpCon(4)
PressCon(0) x
VolCon(5)
VolConPlim(1) x
SpdCon(2)
-SpdCon_QFF
-SpdCon_pLimit x
-SpdCon_nFF
PosCon(3)
-PosCon_QFF
-PosCon_nFF
-PosCon_pLimit x
-PosCon_TrackingError x
Table 7.73: Hydraulic Limitations-
ID Index Name Unit Description
2872 HYD_TabLimit
2872 0..15 HYD_TabLimit Hydraulicvolume/pressure/speedlimit
Table 7.74: Parameter “Hydraulic - Limitations table"
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
197
7 Control
Wait time in Auto mode
After expiration of the waiting time, there is a branch to the motion block specified in
the “subsequent motion block Time Ctrl” (2865 HYD_TabNextIdx). The respective
motion block is only active for the duration of the waiting time, regardless of whether
or not the target has been reached.
ID Index Name Unit Description
2864 HYD_TabWaitTime
2864 0..15 HYD_TabWaitTime Hydraulictabledelaytime
Table 7.75: Parameter “Hydraulic table delay time”
Subsequent motion block Time Ctrl
The motion block index provided here becomes active after expiration of the waiting
time. (0 ms = No timed transition switching)
ID Index Name Unit Description
2865 HYD_TabNextIdx
2865 0..15 HYD_TabNextIdx Hydraulictablenextdefaultindex
Table 7.76: Parameter “Hydraulic table next default index”
Subsequent motion block Event Ctrl
If the transition switching condition P 2867 - Hyd_TabCondType is true, a switchover
is made to the motion block specified here.
ID Index Name Unit Description
2866 HYD_TabAltIdx
2866 0..15 HYD_TabAltIdx Hydraulictablenextalternativeindex
Table 7.77: Parameter “Hydraulic table next alternative index”