ID Index Name Value Unit Description
2851 8 TCritical 10 s Max.permissibletimeatlowspeedand
nominalpressure
2851 9 iGearPump -1 Gearratiobetweenpumpandmotor
2851 10 p0 20 bar Max.permissiblestationarypressureata
standstill
Table 7.99: Pump data settings (continue)
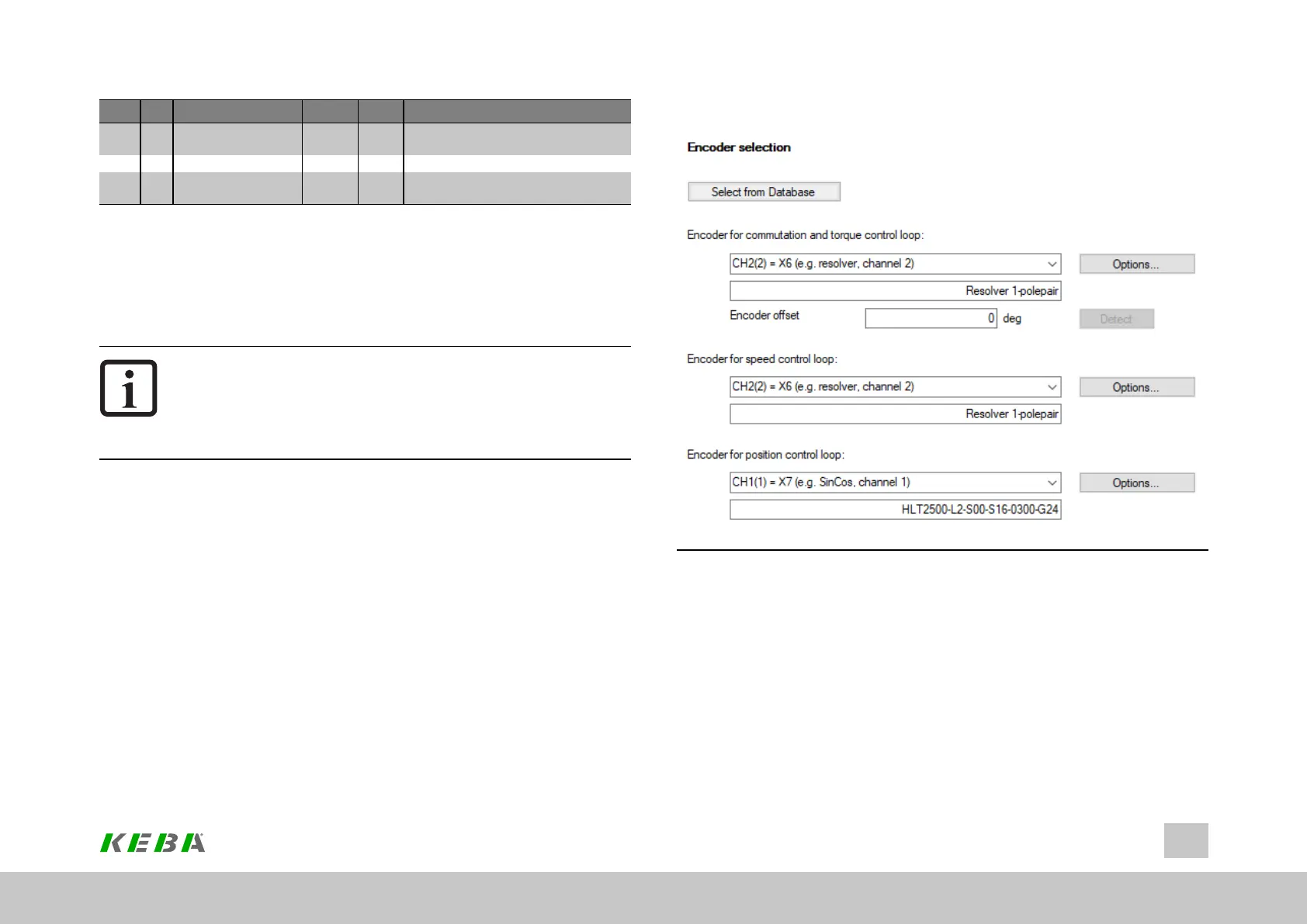
The position and speed actual values are evaluated via the encoder inputs for
position and speed. In this example, an SSI linear encoder is used which must be
set to CH1(1) = X7 (e.g. SinCos, channel 1) via the function selector in the encoder
screen.
NOTE
l Theencoderforcommutationandtorquecontrolaswellasspeed
controlareusedforthemotor.
l Theencoderforpositioncontrolisusedforcylinder-positionand
cylinder-speedcontrol.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
218
7 Control
Image 7.92: “Encoder selection” screen
In addition, the encoder must also be configured under Options. Here, the encoder
type can be set under “Cyclic position via” and the absolute value interface of the
respective encoder.