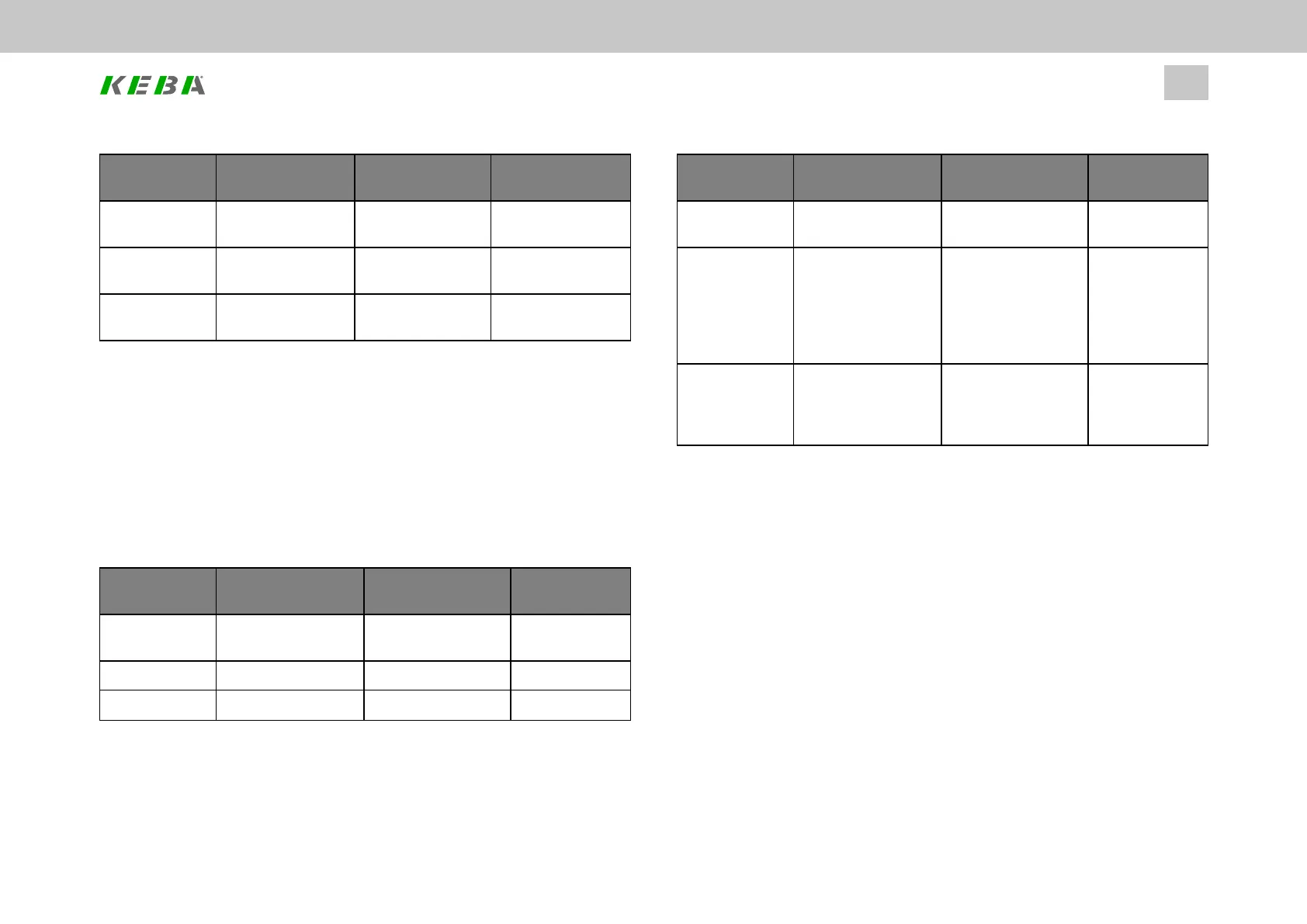
ID Name Function
Standard
rotary system
284
MPRO_FG_
PosUnit
Unitforposition
value
mdegree
287
MPRO_FG_
SpeetUnit
Unitforspeed
value
rev/min
290 MPRO_FG_AccUnit
Unitfor
accelerationvalue
rev/min/s
Table 8.15: Parameters for user-defined scaling (rotary system) (continue)
8.2.3.2Exampleofscalingofalinearmotor
Presetting:
l Onerevolutioncorrespondsto32mmpitch
l Travelin[µm]
l Speedin[mm/sec]
l Accelerationin[mm/s
2
]
ID Name Function
Standard
rotary system
270 MPRO_FG_PosNom
Incrementsper
revolution
1048576
[incr/rev]
271 MPRO_FG_Nom Numerator 1[rev]
272 MPRO_FG_Den Denominator 32000µm
Table 8.16: Parameters for user-defined scaling (linear system)
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
243
8 Motion profile
ID Name Function
Standard
rotary system
273 MPRO_FG_Reverse Reversedirection
False=
clockwise
274
MPRO_FG_
SpeedFac
Speedfactor
1.875rps
correspondsto1
mm/s,1/32mm=
0.03125rps
2
0.03125rps
2
*60
s=1.875rps
275 MPRO_FG_AccFac Accelerationfactor
1/32mm=
0.03125rps
2
correspondingto
1mm/s
2
Table 8.16: Parameters for user-defined scaling (linear system) (continue)