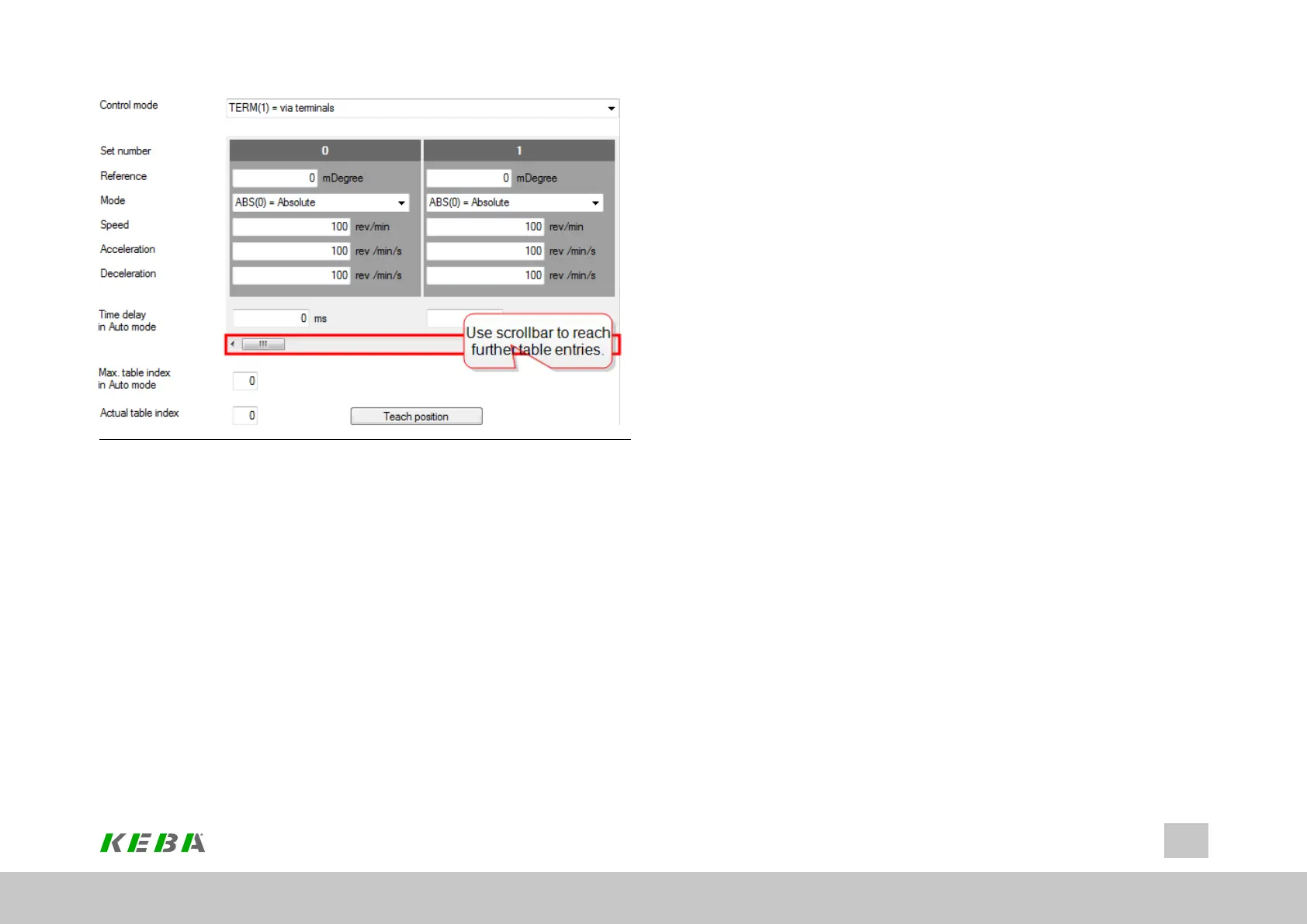
Image 8.67: “Setpoint table” screen when using the "PCON(3) = Position control
mode” control mode
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
270
8 Motion profile
P203 - MPRO_TAB_PMode is used to define the type of positioning used:
l ABS(0)=Absolute
Absolutepositioning
l REL(1)=Relative(after“targetreached”)
Relativepositioningaftertargetpositionreached.
l RELatonce(2)=Relative(atonce)
Abortsacurrentmotiontaskandmoves,asofthecurrentposition,tothenew
reference.
l SPEED(3)=Endless(speedcontrolled)
IfatablevalueissettoSPEED,aninfinitemotiontaskistransmitted.Ifa
tablevaluewiththesettingABSorRELisadditionallyselected,theinfinite
jobisquitandthenewlyselectedtablevalueisapproachedfromthecurrent
position.
Speed
If the Servo controller is run with motor control mode "PCON(3) = Position control
mode" (for information on the setting, see Section "Basic settings" on page 112), the
“Mode” and “Speed” lines will be added to the “Setpoint table” screen.
P201 - MPRO_TAB_PSpd is used to define the speed for a motion task.
Acceleration
With ...
l P 193 - MPRO_TAB_TAcc(fortorquecontrol)or
l P 196 - MPRO_TAB_SAcc(forspeedcontrol)or
l P 199 - MPRO_TAB_PAcc(forpositioncontrol)
and indexes 0–15, the accelerations for moving to the setpoint for each individual
motion task can be defined. The input must not be zero.