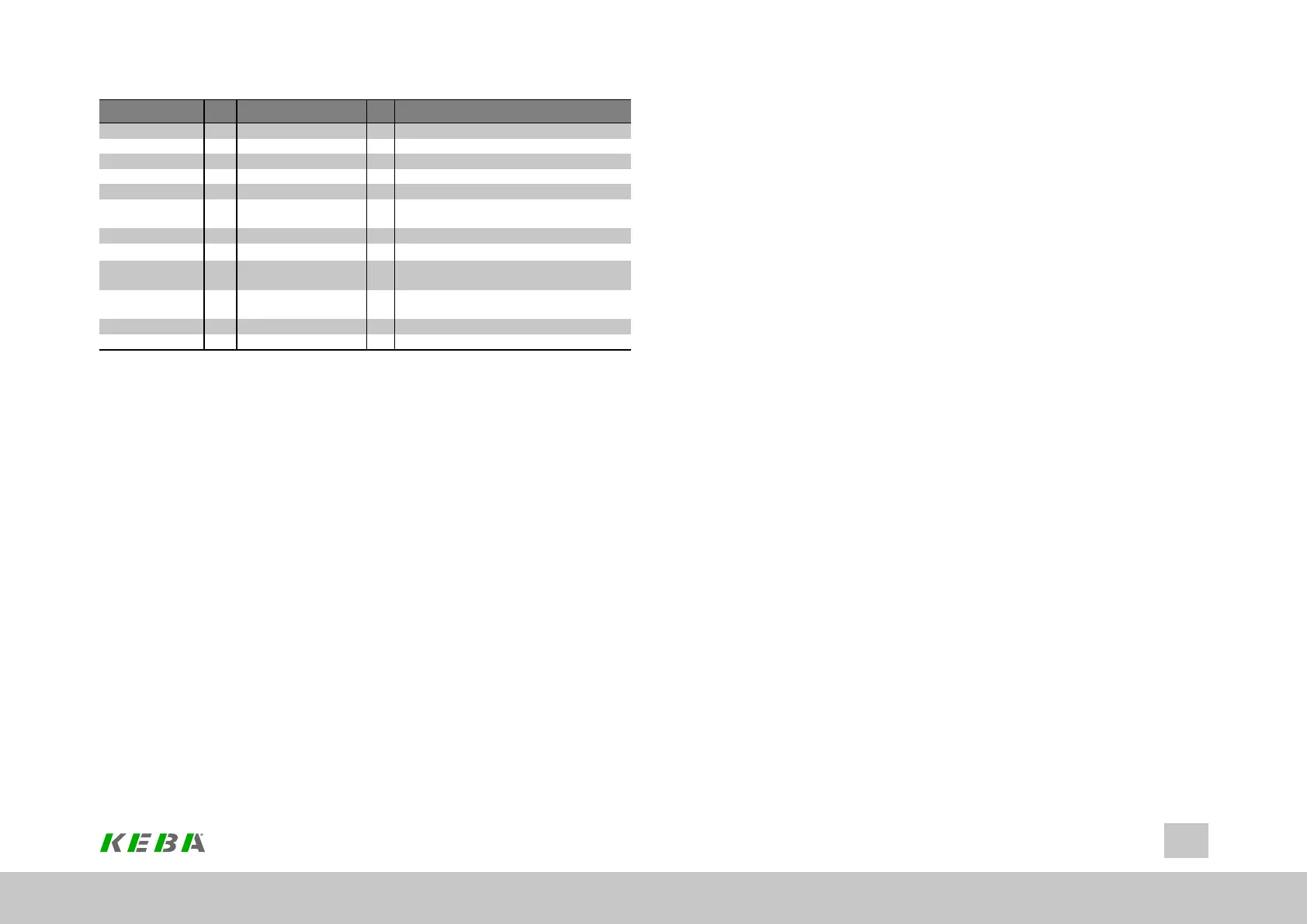
ID Index Name Unit Description
549 0 ENC_CH1_Corr Signalcorrectiontype
550 0-4 ENC_CH1_CorrVal Signalcorrectionvalues
551 0 ENC_CH1_EncObsMin Encodermonitoringminimum,sqrt(a^2+b^2)
552 0... ENC_CH1_AbsEncStatus Errorandstatuscodes(absoluteencoder)
553 0 ENC_CH1_PeriodLen nm Lengthofsignalperiod(Sin/Coslinearencoder)
554 0 ENC_CH1_
DigitalResolution
nm Lengthofoneincrement(linearabsoluteencoder)
555 0 ENC_CH1_Info Encoderinformation
616 0 ENC_CH1_CycleCount
Sampling cycle in: n x 125 μ (microseconds)
610 0 ENC_CH1_
NominalIncrementA
Sign.
per.
NominalincrementA(distancecodedabs.
encoder)
611 0 ENC_CH1_
NominalIncrementB
Sign.
per.
NominalincrementB(distancecodedabs.
encoder)
617 0 ENC_CH1_AbsInitMode Modeabsolutevalueformation
1900 0 ENC_ETS ETSmode,electronicnameplate
Table 6.10: Parameters for channel 1 (X7) - SinCos encoder (continue)
The Sel, Num, Denom, Abs, Lines, MultiT, SingleT and CorrVal parameters are self-
explanatory.
The Code and Mode parameters are described in Section "SSI (cyclical)X7" on
page 70.
l P 547[0] - ENC_CH1_MTBase=MinimumMultiTurnposition
TheMTBaseparameterisusedtosetapositioninthemulti-turnencoder’s
travelpaththatdefinesthepointofdiscontinuity(overflow/underflow)forthe
absolutevalueinitialization(thatis,the“multi-turnbasis”).Assuminga
bipolarencodermeasuringrange,allpositionvaluesthatfallbelowMTBase
willbeshifted“up”(thewholeMTrangewillbeaddedtothemonce).This
methodmakesitpossibletoplacethepointofdiscontinuityatanypoint
withintheencoder’sentiremeasuringrange.Bydefault,MTBasewillbeset
tothelowestpossiblevaluefortheparameter,i.e.reliablyoutsideofthe
encoder’svaluerange:Inthiscase,thefullbipolarrangewillremain
unaffected,asvalueswillneverfallbelowthisMTBasethreshold(see
Section"Channel1:InterfaceX7"onpage59).
l P 548[0] - ENC_CH1_MTEnable=MultiTurnasSingleTurn
TheMTEnableparametermakesitpossibletousemulti-turnencodersas
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
67
6 Encoder
single-turnencodersfortestpurposes.Negativelogic:DefaultMTEnable=0
means"MultiTurn-EnableON".
l P 549[0] - ENC_CH1_Corr=Signalcorrectiontype
TheGPOCroutineusedfortracksignalcorrectionpurposesforsine/cosine
signalsisusedtocompensateforsystematicerrors.Theroutineiscontrolled
withtheCorrandCorrValparameters(seeSection"SignalcorrectionGPOC
(GainPhaseOffsetCorrection)"onpage75).
l P 551[0] - ENC_CH1_EncObsMin=Encodermonitoringminimum,sqrt
(a^2+b^2)
TheparameterEncObsMinisusedtoscaletheSinCoswirebreak
monitoringandrepresentsthe“downwardsthreshold”foranerrormessage.
Thedefaultsettingis0.2,correspondingtoapprox.20%ofthetracksignals’
amplitude(approx.80%correspondstoapprox.1Vss).IfEncObsMinissetto
0,SinCoswirebreakmonitoringwillbedisabled(alsoseeSection"Channel
1:InterfaceX7"onpage59).
l P 552[0] - ENC_CH1_AbsEncStatus=Errorandstatuscodes(absolute
encoder)
TheAbsEncStatusparameterisusedtodisplaystatusinformationfor
HIPERFACEencoders.Insubindex[0],theread“TypeKey”forthe
HIPERFACEencoderwillbeindicated(onebyte),forexample.
l P 553[0] - ENC_CH1_PeriodLen=SinCoslinearencoderand
P 554[0] - ENC_CH1_DigitalResolution-linearabsoluteencoder
arethelengthofananalogueSinCossignalperiodinnanometresandthe
lengthofadigitalincrementofthepositionfromtheabsolutevalueinterface
innanometres.BothparametersareusedforlinearEnDatencodersand
linearHIPERFACEencoders(insteadofMultiTandSingleTbits(rotary)).In
contrast,linearSSIencodersaretreatedasrotarySSIencoders(inthiscase,
itisimpossibletodeterminethatthesystemisalinearencodersystembased
ontheencoderhead).Likewise,linearSinCosencoderswithoutanabsolute
valueinterfacearetreatedas“rotary”encoders(ifrunascommutation
encoders,thenumberoftracks,orlines(Lines)andtheencodergearing
(Num, Denom)mustbeusedtoestablishtherelationshiptothelinear
motor’smagn.polepairsubdivision).OnlyinthecaseofSinCosencoders