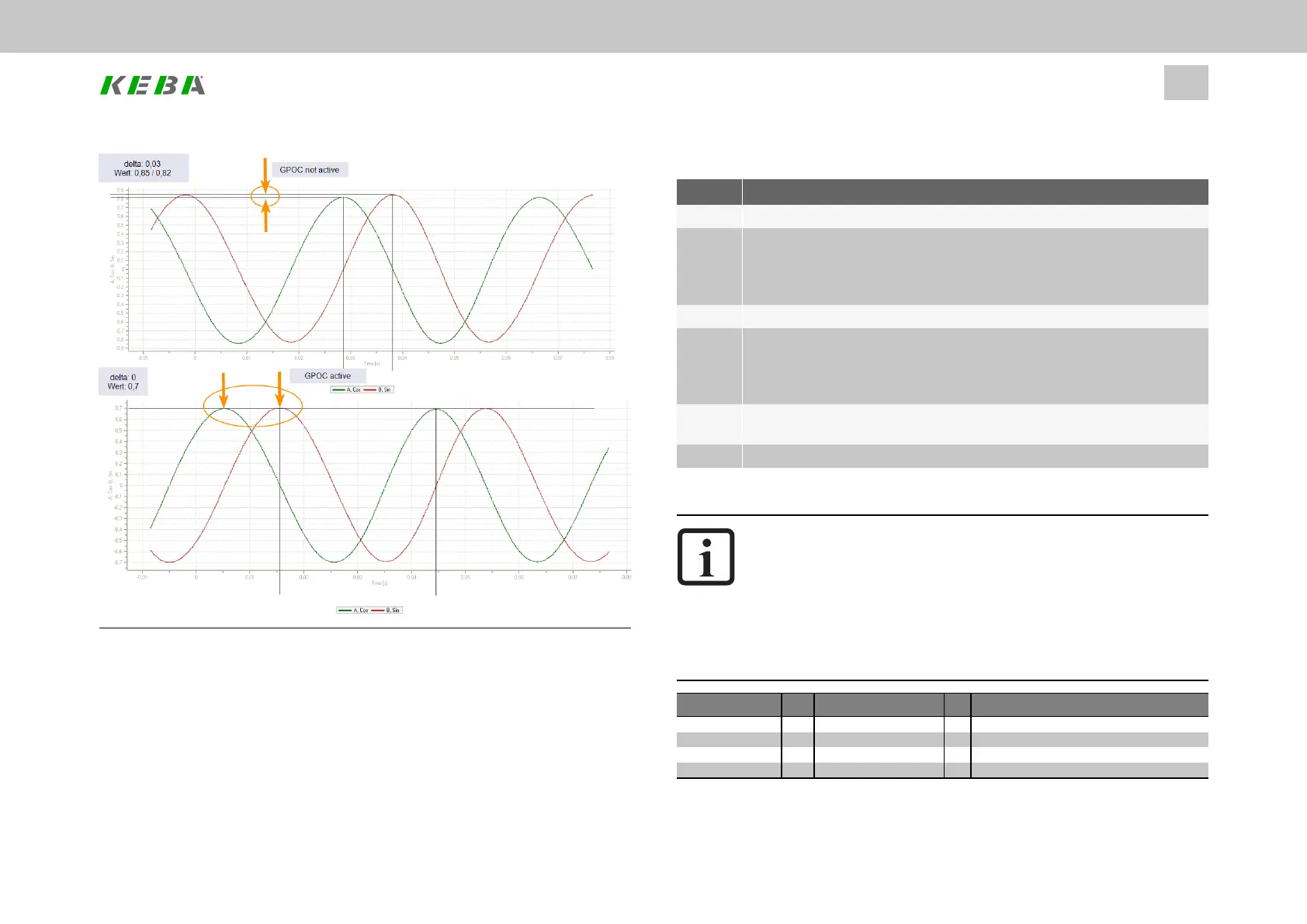
Image 6.4: Track signals A and B with and without GPOC
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
76
6 Encoder
Procedure
Step Action
1. Openthemanualmodewindowandsetspeed-controlledmode.
2.
Motoroperatedatconstantspeed
l Resolver:1000rpm
l SinCosincrementalencoder:1to5rpm
3. SetP 549[0] - ENC_CH1_Corrto"ADAPT(2)=Autocorrection"
4.
Waitabout1–3minutes.Duringthistime,thecompensationalgorithms
willreachtheirsteadystate.Speedrippleshoulddecreaseafterabout1
minute.Thiscanbemonitoredwiththeactualspeedvalueinthescope
orwithP 550 - ENC_CH1_CorrVal.
5.
SetP 549[0] - ENC_CH1_Corrto"CORR(1)=Correctionwithsaved
values".
6. Saveinthedevice
Table 6.17: Configuring and activating GPOC
NOTE
l Theroutinecanalsobekeptenabledpermanently.However,this
approachislessrobustandrequirescarefultestingtodetermine
whethertheimprovedencoderevaluationqualitywillactuallybe
maintainedduringcontinuousoperation.
l TheGPOCroutinewilldeterminetheparametersindividuallyfor
eachencoder.Ifthemotorisreplaced,theGPOCroutinemustbe
activatedagain.
ID Index Name Unit Description
549 0 ENC_CH1_Corr Signalcorrectiontype
550 ENC_CH1_CorrVal Signalcorrectionvalues
550 0 OffsetA Offset,trackA-cosine
550 1 OffsetB Offset,trackB-sine
Table 6.18: Signal correction (GPOC) parameters for channel 1 (X7)