A Feature represents an object defined by a six dimensional pose (position and orientation) relative
to the robot base. You can name a feature for future reference.
Some subparts of a robot program consist of movements executed relative to specific objects
other than the base of the robot arm. These objects can be tables, other machines, workpieces,
vision systems, blanks, or boundaries existing around the robot arm.
The robot includes two predefined features, listed below, with poses defined by the configuration
of the robot arm itself:
•
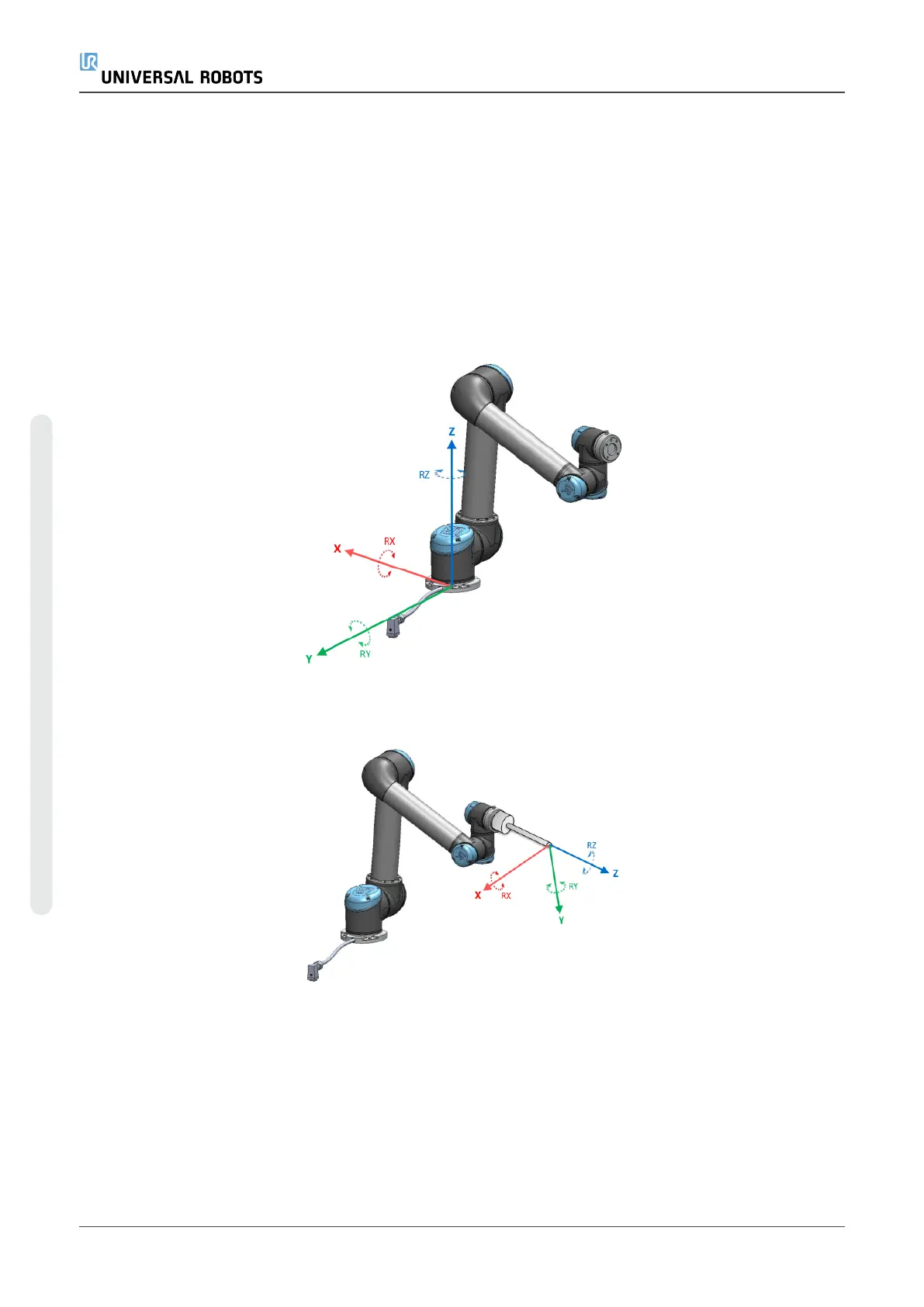
The Base feature is located with origin in the centre of the robot base (see figure 13.1).
•
The Tool feature is located with origin in the centre of the current TCP (see figure 13.2).
13.1:Base feature
13.2:Tool (TCP) feature
Use the Point feature, Line feature and/or Plane feature to define a feature pose.
These features are positioned through a method that uses the current pose of the TCP in the work
area. So you can teach feature locations using Freedrive , or "jogging" to move the robot to the
desired pose.
UR5e 224 User Manual
24.Installation Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












