5.2 b: Application
YASKAWA ELECTRIC SIEP C710616 27G YASKAWA AC Drive A1000 Technical Manual 153
The wait time t is determined by the output frequency when the Run command is removed and by the active deceleration
time.
Figure 5.10
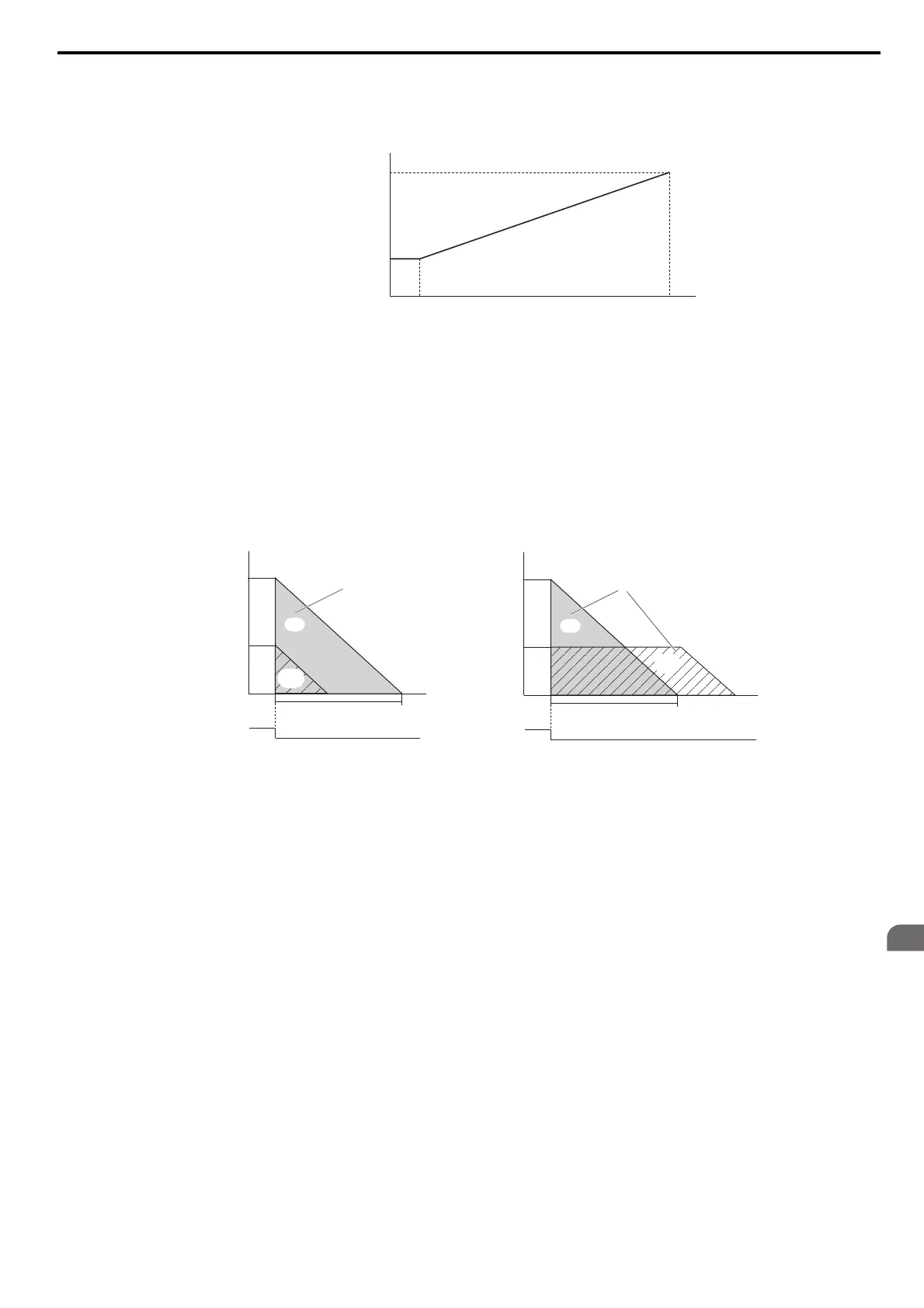
Figure 5.10 Run Wait Time Depending on Output Frequency
Setting 9: Simple Positioning Stop
This method of stopping the motor always decelerates the same distance to stop as shown in Figure 5.11. The stopping
distance S1 is calculated using the maximum output
frequency setting E1-04 and the selected deceleration time. If the
drive is stopped from a frequency lower than the maximum speed it keeps the current speed. When the distance traveled
becomes equal to S1 - S2, the drive decelerates to stop using the current deceleration time. The stopping accuracy can be
adjusted using the positioning gain set in parameter d4-12.
Figure 5.11
Figure 5.11 Simple Positioning Deceleration
Precautions when using Simple Positioning:
• Changing the deceleration time during the
deceleration will result in inaccurate positioning as the calculation considers
the deceleration time that was active only when the Run command was removed.
• The Dwell function must be deactivated (b6-03 and b6-04 = 0).
• The KEB function cannot be used (H1- must be different than 65/66/7A/7B).
• The Stall Prevention during stop must be deactivated (L3-0
4 = 0). For regenerative loads a braking option might be
necessary.
• The overvoltage suppression must be disabled (L3-11 = 0).
• High Slip Braking must be deactivated (H1- must be different from 68).
• The S-curves at deceleration start and decele
ration end must be inactive (C2-03/04 = 0).
Min output
frequency
100%
(Max output
frequency)
Output frequency
when Stop command
was entered
Run wait time t
Active deceleration time
Min Baseblock Time (L2-03)
Max. output
frequency
Deceleration
distance
S1
S1
Set deceleration time
Motor speed
t
Run command
Max. output
frequency
Deceleration
distance
S1
Set deceleration time
Motor speed
t
Run command
S2
Normal Deceleration
Simple Positioning