5.2 b: Application
YASKAWA ELECTRIC SIEP C710616 27G YASKAWA AC Drive A1000 Technical Manual 173
PID Feedback Loss Detection
The PID feedback loss detection function can detect broken sensors or broken sensor wiring. It should be used whenever
PID control is enabled to prevent critical machine conditions (e.g., acceleration to max. frequency) caused by a feedback
loss.
Feedback loss can be detected in two ways:
• Feedback Low De
tection
Detected when the feedback falls below
a certain level for longer than the specified time. This function is set up using
parameters b5-12 to b5-14.
• Feedback High De
tection
Detected when the feedback rises beyond a certain level
for longer than the specified time. This function is set up using
parameters b5-12, b5-36, and b5-37.
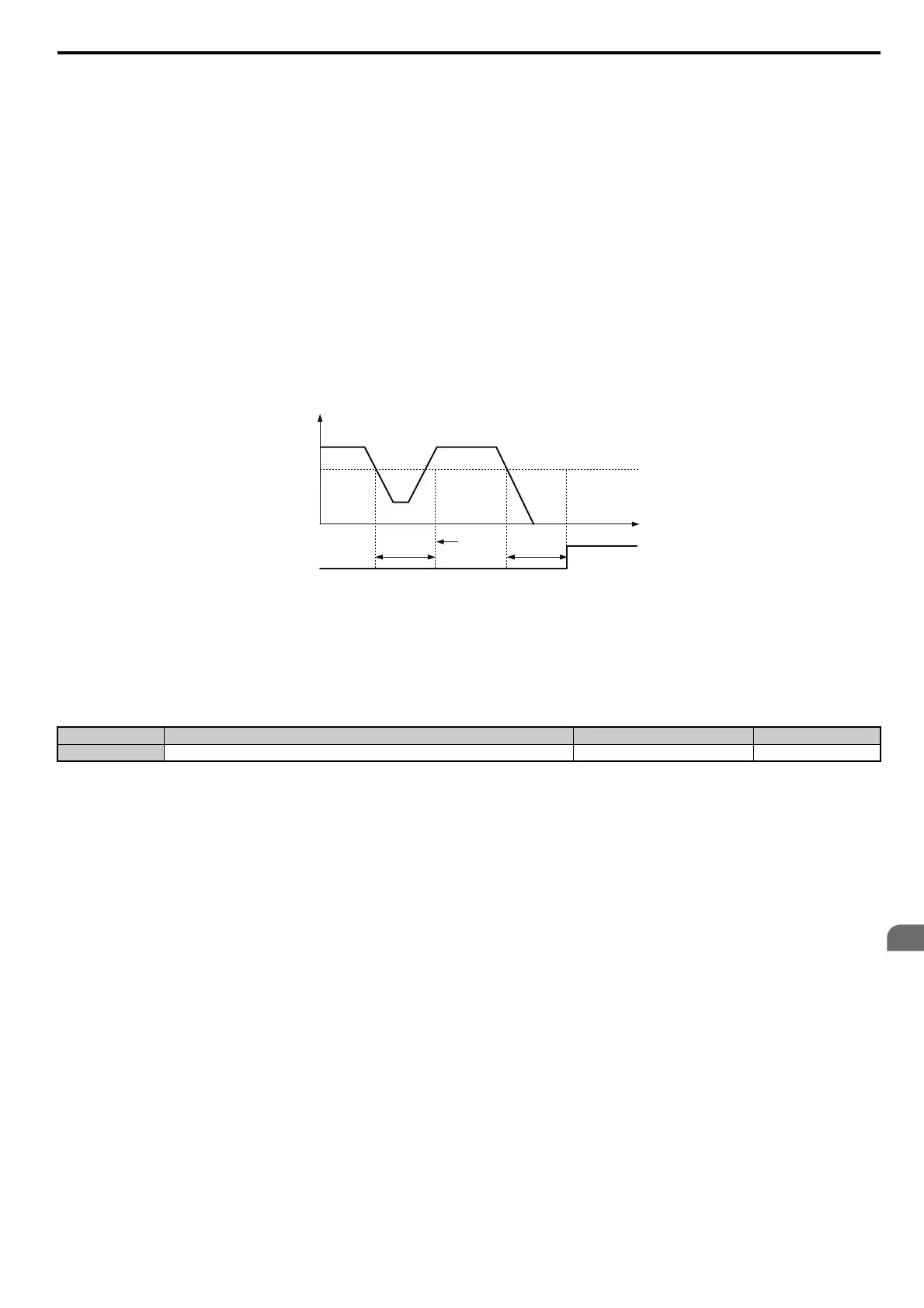
The following figure explains the working principle of feedback loss detection when the feedback signal
is too low.
Feedback high detection works in the same way.
Figure 5.27
Figure 5.27 PID Feedback Loss Detection
b5-12: PID Feedback Loss Detection Selection
Enables or disables the feedback loss detection and sets the operation when a feedback loss is detected.
Setting 0: Multi-Function Digital Outputs Only
Multi-function digital outputs set for “PID feedback low” (H2- = 3E) will be triggered if the PID feedback value is
below the detection level set to b5-13 for the time set to b5-14 or longer. Multi-function digital outputs set for “PID
feedback high” (H2- = 3F) will be triggered if the PID feedback
value is beyond the detection level set to b5-36 for
longer than the times set to b5-37. Neither a fault nor an alarm is displayed on the digital operator. The drive will
continue operation. The multi-function digital outputs reset when the feedback value leaves the loss detection range.
Setting 1: Feedback Loss Alarm
If the PID feedback value falls below the level set to b5-13 for longer than the time set to b5-14, a “FBL - Feedback
Low” alarm will be displayed and a digital output set for “PID feedback low” (H2- = 3E) will be triggered. If the
PID fee
dback value exceeds the level set to b5-36 for longer than the time set to b5-37, a “FBH - Feedback High” alarm
will be displayed and a digital output set for “PID feedback high” (H2- = 3F) will be triggered. Both events trigger
an alarm
output (H1- = 10). The drive will continue operation.
The alarm and multi-function digital outputs reset
when the feedback value leaves the loss detection range.
Setting 2: Feedback Loss Fault
If the PID feedback value falls below the level set to b5-13 for longer than the time set to b5-14, a “FbL - Feedback Low”
fault will be displayed. If the PID feedback value exceeds the level set to b5-36 for longer than the time set to b5-37, a
“FbH - Feedback High” fault will be displayed. Both events trigger a fault output (H1- = E) and cause the drive to
stop the
motor.
No. Parameter Name Setting Range Default
b5-12 PID Feedback Loss Detection Selection 0 to 5 0
PID feedback value
PID
Feedback
Detection
Loss Level
(b5-13)
PID Feedback
Loss Detection Time
(b5-14)
no FbL
detection
FbL detection
time
PID Feedback
Loss Detection Time
(b5-14)