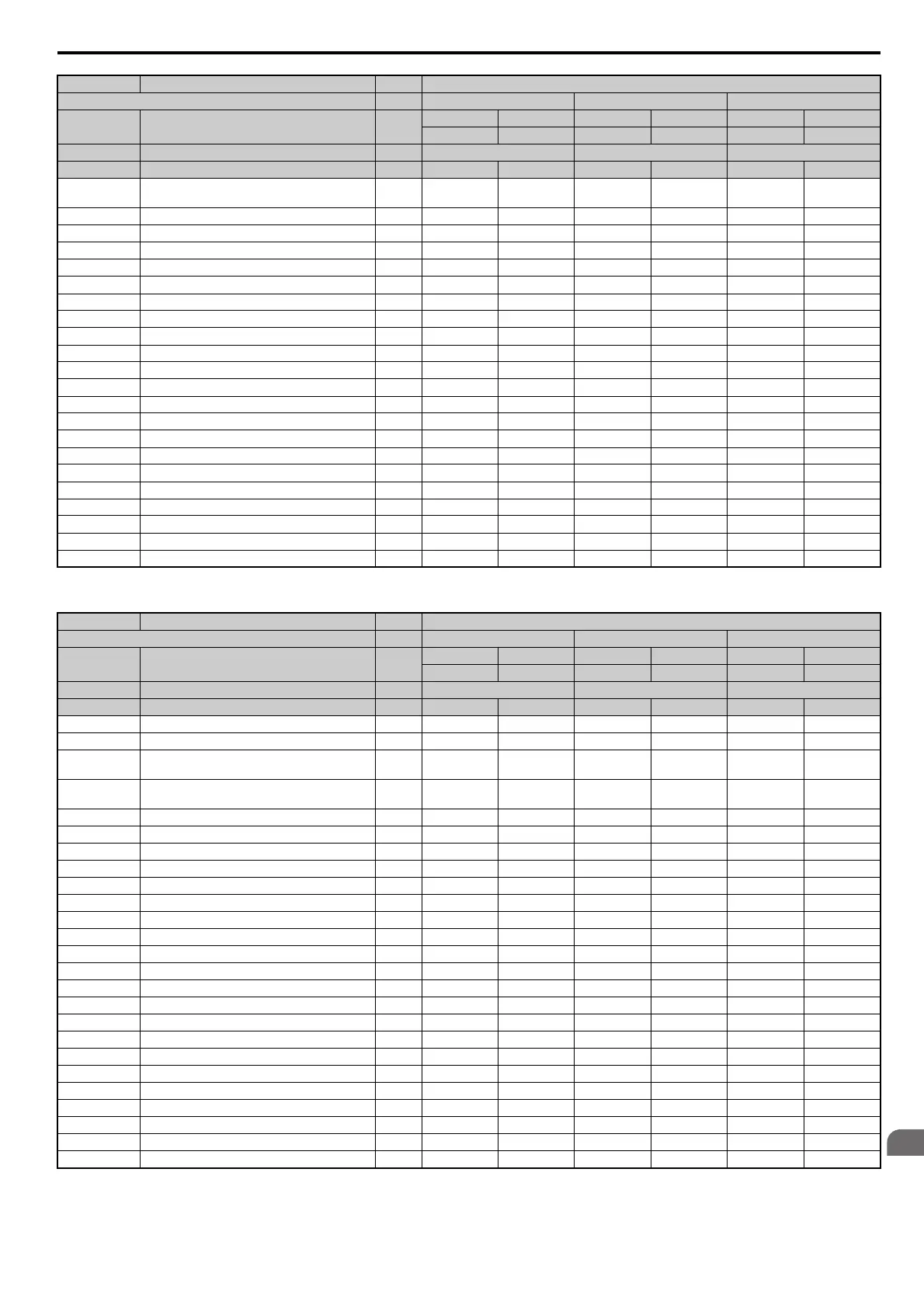
B.6 Defaults by Drive Model Selection (o2-04) and ND/HD (C6-01)
YASKAWA ELECTRIC SIEP C710616 27G YASKAWA AC Drive A1000 Technical Manual 529
b3-08
Current Control Gain during Speed Search (Speed
Estimation Type)
– 0.8 0.8 0.8 0.8 0.8 0.8
b3-26
<66> Start Speed Search Select – – – – – – –
b8-03 Energy Saving Control Filter Time Constant s 2.00 2.00 2.00 2.00 2.00 2.00
b8-04 Energy Saving Coefficient Value – 30.13 30.57 30.57 27.13 27.13 21.76
C5-17 (C5-37) Motor Inertia
kgm
2
3.30 3.60 3.60 4.10 4.10 6.50
C6-02 Carrier Frequency Selection – 1 7 1 7 1 7
E2-01 (E4-01) Motor Rated Current A 270 310 310 370 370 500
E2-02 (E4-02) Motor Rated Slip Hz 1.35 1.3 1.3 1.3 1.3 1.25
E2-03 (E4-03) Motor No-Load Current A 70 81 81 96 96 130
E2-05 (E4-05) Motor Line to Line Resistance 0.029 0.025 0.025 0.02 0.02 0.014
E2-06 (E4-06) Motor Leakage Inductance % 20 20 20 20 20 20
E2-10 (E4-10) Motor Iron Loss for Torque Compensation W 2850 3200 3200 3700 3700 4700
E5-01 Motor Code Selection (for PM Motors) Hex. 124A 124A FFFF FFFF FFFF FFFF
L2-02 Momentary Power Loss Ride-Thru Time s 2 2 2 2 2 2
L2-03 Momentary Power Loss Minimum Baseblock Time s 1.8 1.9 1.9 2 2 2.1
L2-04 Momentary Power Loss Voltage Recovery Time s 1 1 1 1 1 1
L3-24 Motor Acceleration Time for Inertia Calculations s 0.777 0.864 0.864 0.91 0.91 1.392
L8-02 Overheat Alarm Level C 130 130 140 140 140 140
L8-35 Installation Method Selection – 0 0 0 0 0 0
L8-38 Carrier Frequency Reduction Selection – 2 2 2 2 2 2
n1-03 Hunting Prevention Time Constant ms 30 30 100 100 100 100
n5-02 Motor Acceleration Time s 0.777 0.864 0.864 0.91 0.91 1.392
<66> This parameter is available in models CIMR-A4A0930 and 4A1200.
No.
<66> This parameter is available in models CIMR-A4A0930 and 4A1200.
Name Unit Default Settings
Model CIMR-A – 4A0675 4A0930 4A1200
C6-01 Drive Duty Selection –
HD ND HD ND HD ND
0 1 0 1 0 1
o2-04 Drive Model Selection Hex. AE B0 B2
E2-11 (E4-11) Motor rated Output kW 315 355 450 500 560 630
b3-04 V/f Gain during Speed Search % 60 60 60 60 60 60
b3-06 Output Current 1 during Speed Search – 0.7 0.7 0.7 0.7 0.7 0.7
b3-07 <66>
Output Current 2 during Speed Search (Speed
Estimation Type)
– – – 3.0 2.0 3.0 2.0
b3-08
Current Control Gain during Speed Search (Speed
Estimation Type)
– 0.8 0.8 0.8 0.8 0.8 0.8
b3-26 <66> Start Speed Search Select – – – 1000 1000 1000 1000
b8-03 Energy Saving Control Filter Time Constant s 2.00 2.00 2.00 2.00 2.00 2.00
b8-04 Energy Saving Coefficient Value – 21.76 23.84 21.4 20.26 18.12 17.06
C5-17 (C5-37) Motor Inertia
kgm
2
11.00 12.00 13.00 14.00 18.00 18.00
C6-02 Carrier Frequency Selection – 1 7 1 1 1 1
E2-01 (E4-01) Motor Rated Current A 500 650 800 900 1090 1200
E2-02 (E4-02) Motor Rated Slip Hz 1.25 1 1 0.9 0.8 0.7
E2-03 (E4-03) Motor No-Load Current A 130 130 160 180 218 240
E2-05 (E4-05) Motor Line to Line Resistance 0.014 0.012 0.01 0.009 0.007 0.006
E2-06 (E4-06) Motor Leakage Inductance % 20 20 20 20 20 20
E2-10 (E4-10) Motor Iron Loss for Torque Compensation W 4700 5560 7050 7833 9870 11123
E5-01 Motor Code Selection (for PM Motors) Hex. FFFF FFFF FFFF FFFF FFFF FFFF
L2-02 Momentary Power Loss Ride-Thru Time s 2 2 2 2 2 2
L2-03 Momentary Power Loss Minimum Baseblock Time s 2.1 2.3 2.8 3.1 4 4.6
L2-04 Momentary Power Loss Voltage Recovery Time s 1 1 2.6 3 3.8 4.5
L3-24 Motor Acceleration Time for Inertia Calculations s 1.392 1.667 2 2.222 2.857 3.333
L8-02 Overheat Alarm Level C 140 140 140 140 140 140
L8-35 Installation Method Selection – 0 0 0 0 0 0
L8-38 Carrier Frequency Reduction Selection – 2 2 2 2 2 2
n1-03 Hunting Prevention Time Constant ms 100 100 100 100 100 100
n5-02 Motor Acceleration Time s 1.392 1.667 2 2.222 2.857 3.333
No. Name Unit Default Settings
Model CIMR-A – 4A0362 4A0414 4A0515
C6-01 Drive Duty Selection –
HD ND HD ND HD ND
0 1 0 1 0 1
o2-04 Drive Model Selection Hex. A9 AA AC
E2-11 (E4-11) Motor rated Output kW 160 185 185 220 220 250

 Loading...
Loading...















