Controllers
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
442
of 820
4.7
With torque control, the controller receives the torque current from the writable parameter
Isq-set value for torque control (
Z18.50–). The torque current is then passed to the motor
manager. The parameter value for the torque current can be specified from analog inputs,
for example, or from the Fieldbus.
If the synchronized drive operating mode (Z109.1– = -5) is activated and at the same time
the synchronized operating mode (Z145.2–) "Synchronized operation on a real master
shaft“ is set, the set values from the set value manager are overwritten. The electronic
gearbox (
Z145.3– and Z145.4–) is then computed. The set values for the controller are
then calculated from the set value at the gearbox output.
In the "Synchronized operation on a virtual master shaft" mode the set values, including
the electronic gearbox, are calculated in the Synchronized Operation module and for
-
warded to the position and speed controllers via the set value manager.
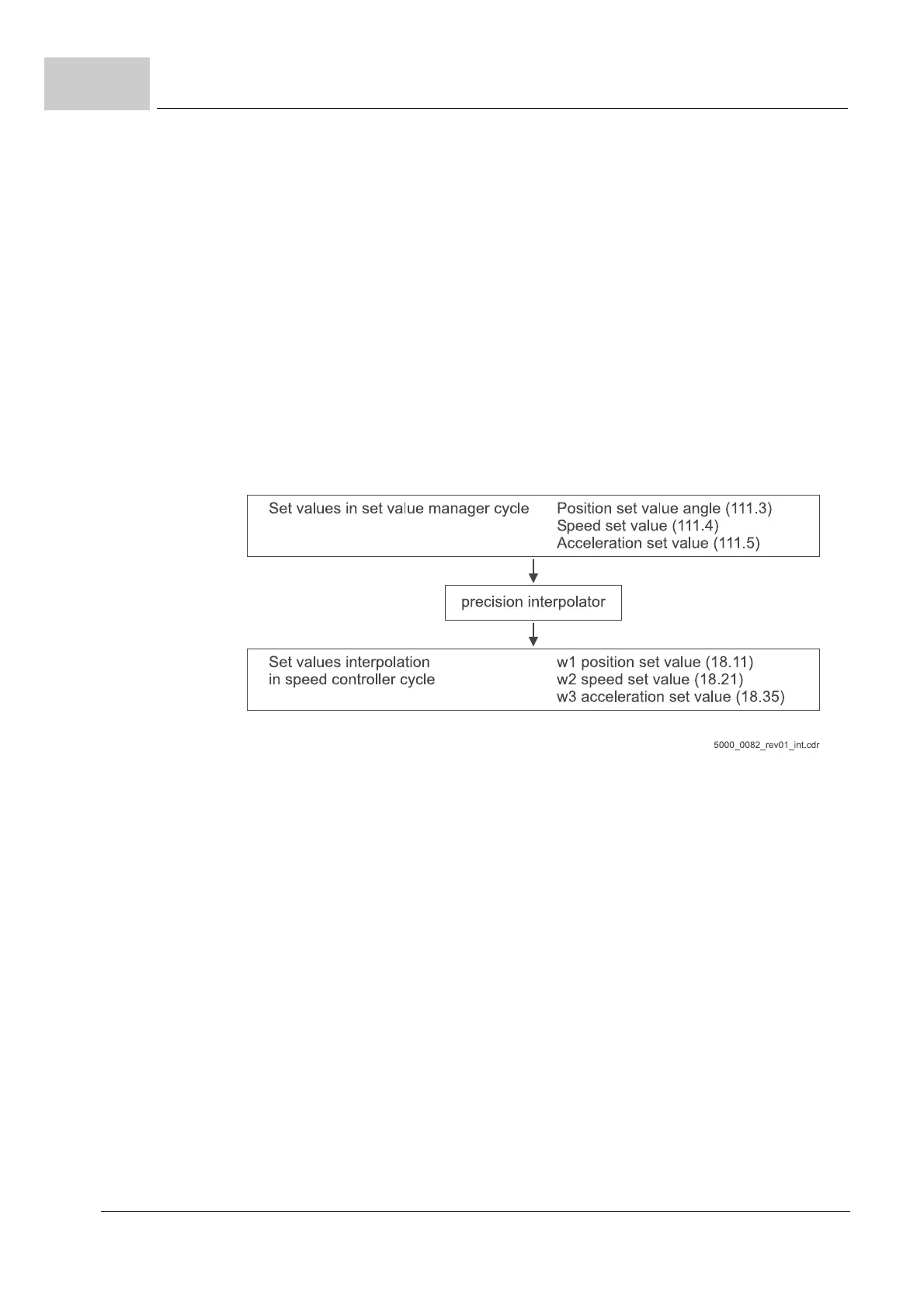
The module incorporates a set value interpolator which converts and interpolates or ex-
trapolates the set values from the set value manager in the controller cycle.
Block diagram of the fine interpolator in the position / speed controller
Figure 141: Block diagram of the fine interpolator in the position / speed controller
ZFig. 142– to ZFig. 145– show the block diagrams for the position / speed controller in
the speed controller, position controller and torque control modes.