Summary of all Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
774
of 820
6
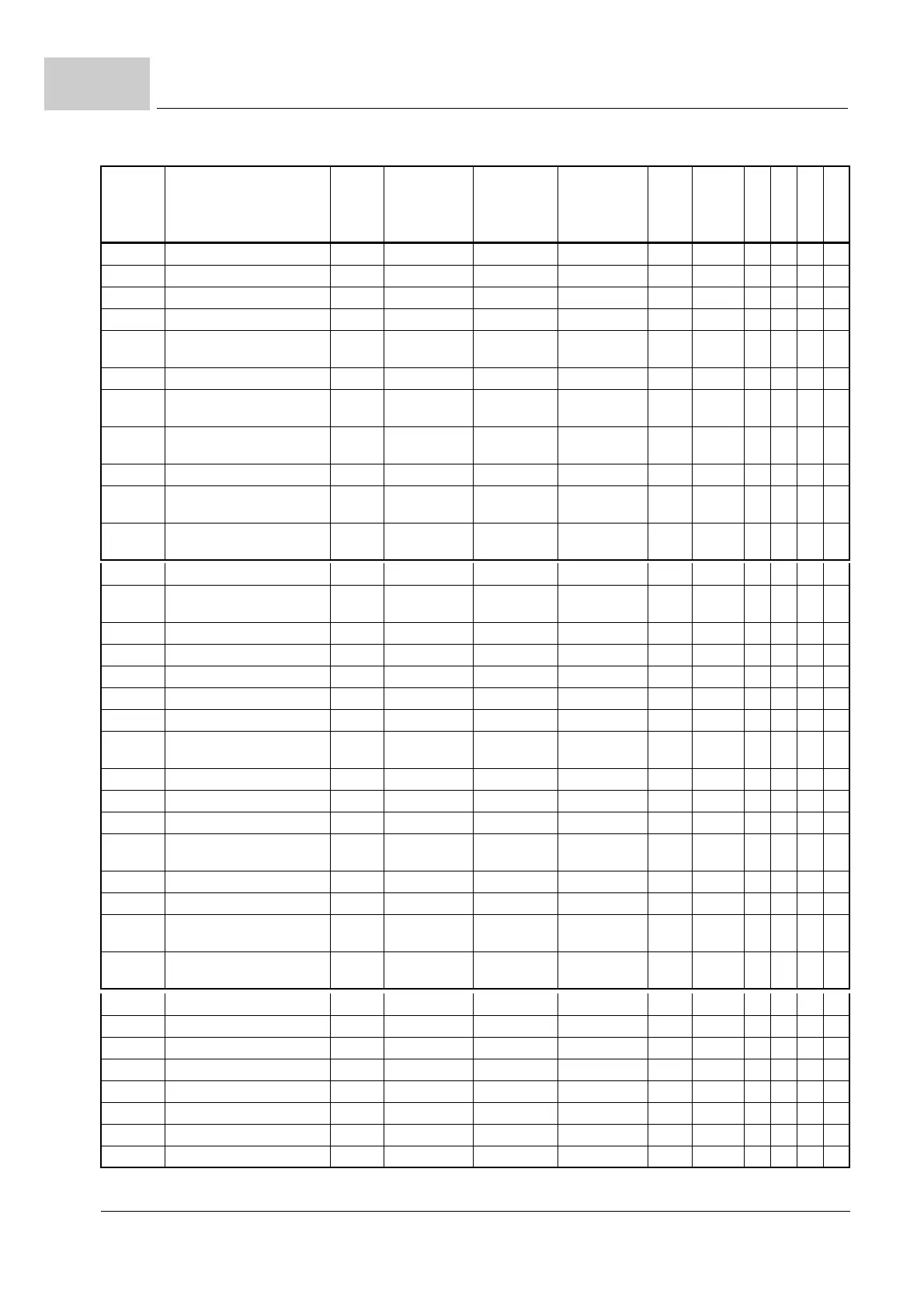
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
18.61 Position error angle DINT -2147483648 2147483647 0 INC 1:1 X
18.62 Position error revolutions DINT -2147483648 2147483647 0 INC 1:1 X
18.68 Speed additional value FLOAT -150000 150000 0 Grad/s 1:1 X
18.69 Speed set value FLOAT -1000000 1000000 0 Grad/s 1:1 X
18.70 w2-Feedforward time cons-
tant
FLOAT 0 50 0 ms 1:1 X
18.71 Speed set value positive limit FLOAT 0 1000000 18000 Grad/s 1:1 X X X
18.72 Speed set value negative
limit
FLOAT -1000000 0 -18000 Grad/s 1:1 X X X
18.73 x3 acceleration actual value FLOAT -1e9 1e9 0 Grad/
s
2
1:1 X
18.74 x3 acceleration time constant FLOAT 0 10000 0 ms 1:1 X
18.76 Position actual angle for
fieldbus
UDINT 0 0xFFFFFFFF 0 Inc 1:1 X
18.77 Position actual revolutions
for fieldbus
UDINT 0 0xFFFFFFFF 0 1:1 X
19.3 Motormanager status UINT 0 60 0 1:1 X
19.5 Max. drive current actual
value
FLOAT 0 10000 0 A 1:1 X
19.6 Max. drive current FLOAT 0.0 10000 1.5 A 1:1 X
19.7 Max. field current amplitude FLOAT 0 10000 0 A 1:1 X
19.8 Max. torque current FLOAT 0 10000 0 A 1:1 X
19.9 Field current preset value FLOAT -10000 10000 0 A 1:1 X
19.10 Motor nominal torque current FLOAT 0.1 10000 3.5 A 1:1 X
19.11 Ke factor in V/Nnom FLOAT 0 1000 0 V/
N
nenn
1:1 X
19.12 Frequency current filter FLOAT 0.0 3000 0.0 Hz 1:1 X
19.17 Isq additive set value FLOAT -300 300 0.0 A 1:1 X
19.18 Rho-RT0 motor interface UINT 0 0xFFFF 0 1:1 X
19.30 Slip frequency actual tempe-
rature
FLOAT 0.0 100 2,384615 Hz 1:1 X
19.32 Rotor time constant FLOAT 0.0 20 20 s 1:1 X
19.50 Notch position valid UINT 0x0 0xF 0x1 1:1 X
19.51 Current ref. for notch position
detection
FLOAT 0.0 100 50 % 1:1 X
19.52 Modus motor operating
mode
UINT 0 2 0 1:1 X
29.1 Command UINT 0 1 0 1:1 X
29.2 Status UINT 0 1 0 1:1 X
29.6 Input value FLOAT -5000000000 5000000000 0.000000e+00 1:1 X
29.7 Output value FLOAT -5000000000 5000000000 0.000000e+00 1:1 X
29.8 Filter order UINT 0 7 1 1:1 X
29.9 Coefficient a0 FLOAT -1000000 1000000 1.0 1:1 X
29.10 Coefficient a1 FLOAT -1000000 1000000 0.0 1:1 X
29.11 Coefficient a2 FLOAT -1000000 1000000 0.0 1:1 X