Summary of all Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07
797
of 820
6
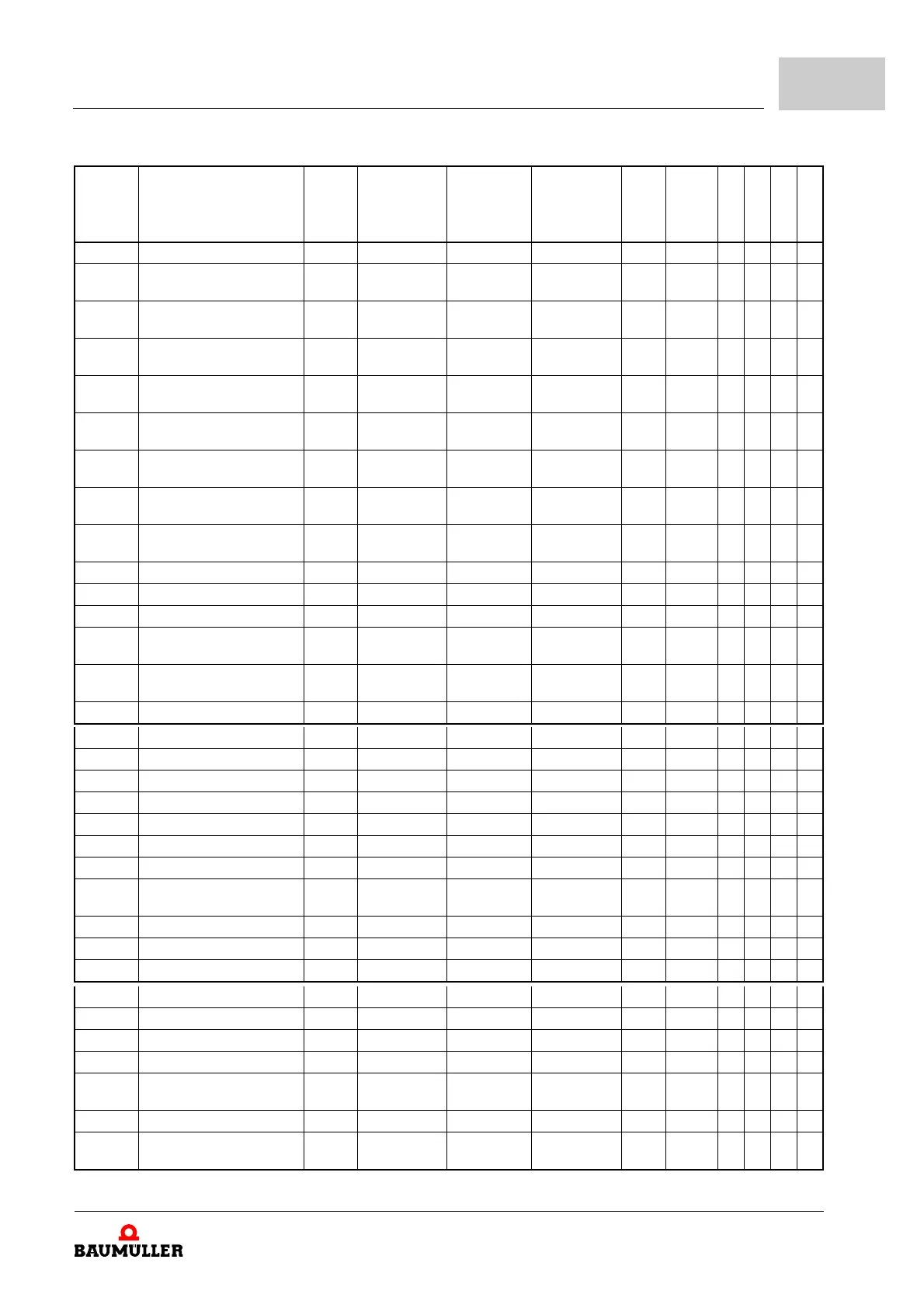
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
145.3 Gear slave shaft revolutions DINT -2147483647 2147483647 1 1:1 X
145.4 Gear master shaft revolu-
tions
DINT 1 2147483647 1 1:1 X
145.5 Speed limit master shaft UDINT 0 0x7FFFFFFF 0x7FFFFFFF Inc/
Tab
1:1 X
145.6 Synchronization velocity
window
UDINT 1 2147483647 10000 Inc/ms 10000:1 X
145.7 Synchronization acceleration UDINT 1 6553600 10000 Inc/
ms²
10000:1 X X
145.8 Synchronization deceleration UDINT 1 6553600 10000 Inc/
ms²
10000:1 X X
145.9 Synchronization maximum
jerk
UDINT 1 6553600 1000 Inc/
ms³
10000:1 X X
145.10 Virtual master speed set
value
DINT -2147483647 2147483647 0 Inc/ms 10000:1 X
145.11 Virt. master set value cycle
time
UINT 1 128 1 ms 1:1 X
145.12 Master speed DINT -2147483647 2147483647 0 Inc/ms 10000:1 X
145.13 Master position revolutions UDINT 0 0xFFFFFFFF 0 Inc 1:1
145.14 Master position angle UDINT 0 0xFFFFFFFF 0 Inc 1:1
145.15 Master speed set value addi-
tive 1
DINT -2147483647 2147483647 0 Inc/ms 10000:1 X
145.16 Master speed set value addi-
tive 2
DINT -2147483647 2147483647 0 Inc/ms 10000:1 X
145.18 Master angle offset DINT 0x80000000 0x7FFFFFFF 0x0 Inc 1:1 X
146.1 Induction motor mode UINT 0 0xFFFF 0 1:1 X
146.10 Kp flux controller FLOAT 0 1e9 0 1/s 1:1 X
146.11 Tn flux controller FLOAT 0 10000 1000 ms 1:1 X
146.12 Limit magnetizing current FLOAT 0 1e9 10 A 1:1 X
146.13 Flux set value FLOAT -1e9 1e9 1 % 100:1 X
146.14 Actual flux FLOAT -1e9 1e9 0 % 100:1 X
146.15 Actual flux current FLOAT -1e9 1e9 0 A 1:1 X
146.16 Slip DINT 0x80000000 0x7FFFFFFF 0 Inc /
Tab
1:1 X
146.17 State Lh identification UINT 0 10 0 1:1 X
146.18 Integral term flux controller FLOAT -1e9 1e9 0 A 1:1 X
146.19 Rising time nominal speed FLOAT 1 1000 10 s 1:1 X
147.1 Mode UDINT 0 0xFFFFFFFF 0 1:1 X
147.2 Status master UINT 0 0xFFFF 0 1:1 X
147.3 Status slave UINT 0 0xFFFF 0 1:1 X
147.4 Coupling command master UINT 0 1 0 1:1 X
147.5 Torque coupling factor mas-
ter
FLOAT 0 1 0 1:1 X
147.6 Torque coupling factor slave FLOAT 0 1 0 1:1 X
147.7 Compensating controller P-
gain
FLOAT 0 10000 2 Grad/
Nms
1:1 X
 Loading...
Loading...