Summary of all Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
798
of 820
6
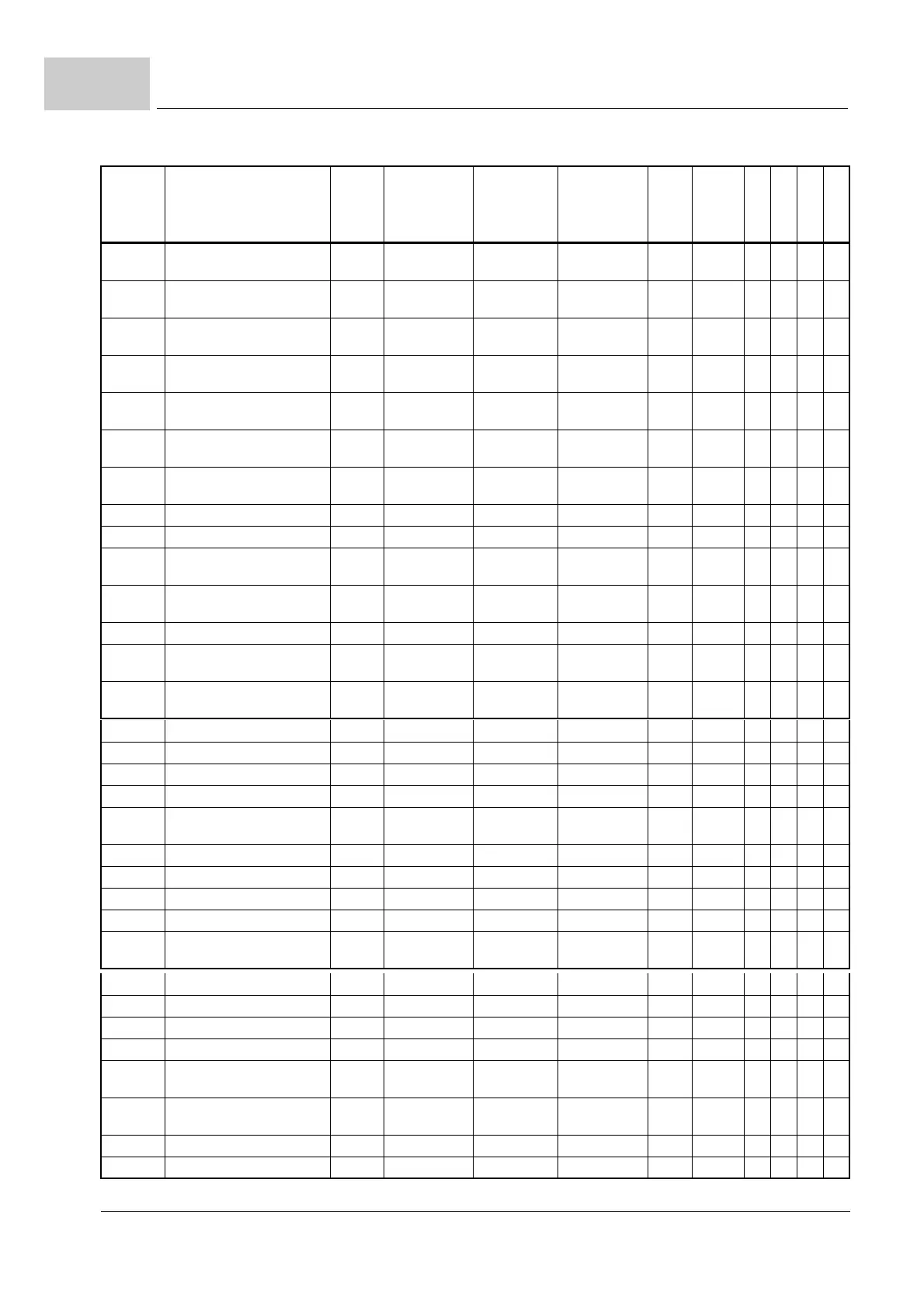
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
147.8 Compensating controller
integral action time
FLOAT 0 100000 10 ms 1:1 X
147.9 Compensating controller out-
put upper limit
FLOAT 0 180000 18000 Grad/s 1:1 X
147.10 Compensating controller out-
put lower limit
FLOAT -180000 0 -18000 Grad/s 1:1 X
147.11 Compensating controller set
value
FLOAT -10000 10000 0 Nm 1:1 X
147.12 Compensating controller
actual value
FLOAT -10000 10000 0 Nm 1:1 X
147.13 Compensating controller out-
put
FLOAT -180000 180000 0 Grad/s 1:1 X
147.14 Compensating controller
integral term
FLOAT -2000000 2000000 0 Nm/s 1:1 X
147.15 Torque init stress 0 FLOAT -10000 10000 0 Nm 1:1 X
147.16 Torque init stress 1 FLOAT -10000 10000 0 Nm 1:1 X
147.17 Speed limit torque init stress
1
FLOAT 1 180000 1 Grad/s 1:1 X
147.18 Torque init stress pt1 time
constant
FLOAT 0 5000 0 ms 1:1 X
147.19 Torque set value master DINT -10000000 10000000 0 mNm 1:1 X
147.20 Torque init stress actual
value
FLOAT -10000 10000 0 Nm 1:1 X
147.21 Torque init stress actual
value master
DINT -10000000 10000000 0 mNm 1:1 X
148.1 Mode DWORD 0x0 0xFFFFFFFF 0x0 1:1 X
148.2 Status UDINT 0 0xFFFFFFFF 0 1:1 X
148.3 Target position UDINT 0 0xFFFFFFFF 0 Inc 1:1 X X
148.4 Speed limit UDINT 0 13200 1000 Inc/ms 1:1 X
148.5 Acceleration limit UDINT 25 45000 200 Inc/
ms
2
100:1 X
148.6 Position Error Limit UDINT 0 0xFFFFFFFF 0xFFFFFFFF Inc 1:1 X
148.7 Position Error Time UINT 0 65535 65535 ms 1:1 X
148.8 Output position set value UDINT 0 0xFFFFFFFF 0 Inc 1:1 X
148.9 Output speed set value DINT -65535 65535 0 Inc/ms 1:1 X
148.10 Output acceleration set value DINT -65535 65535 0 Inc/
ms
2
100:1 X
149.1 Status DWORD 0x0 0xFFFFFFFF 0x0 1:1 X
149.2 Mode DWORD 0x0 0xFFFFFFFF 0x0 1:1 X
149.3 Spindle angle position UDINT 0 0x0000FFFF 0 Inc 1:1 X X
149.4 Spindle positioning speed UDINT 0.0625 32767.0000 100.0000 Inc/ms 10000:1 X
149.5 Spindle acceleration bipolar UDINT 0.07 655.35 2.00 Inc/
ms
2
100:1 X
149.6 Spindle maximum jerk UDINT 0.07 655.35 0.25 Inc/
ms
3
100:1 X
149.9 Spindle relative offset UDINT 0 0x0000FFFF 0 Inc 1:1 X
149.10 Active target position UDINT 0 0xFFFFFFFF 0 Inc 1:1 X

 Loading...
Loading...