Parameter descriptions
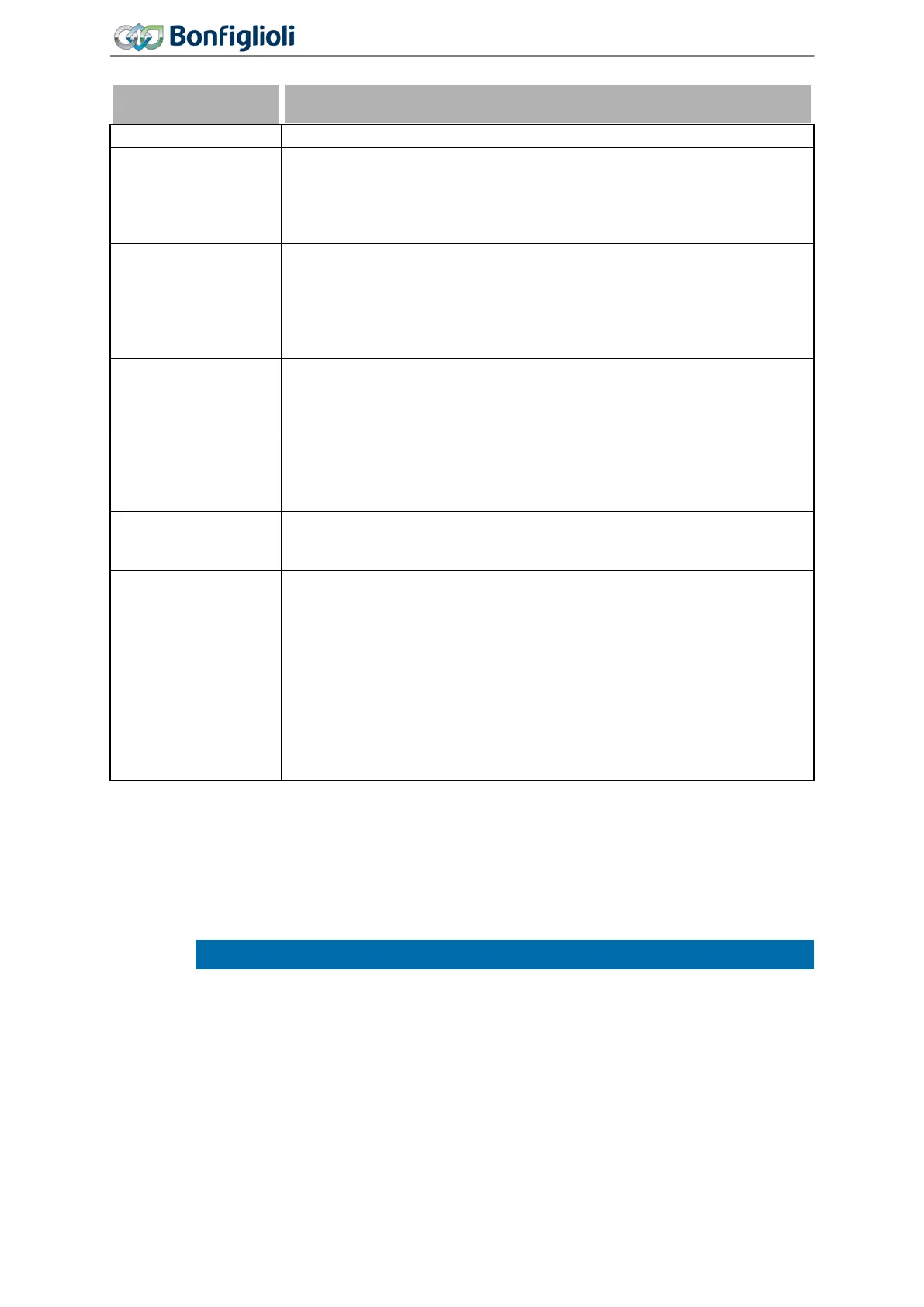
Operation Mode Fly-
ing Start 645
0 -
Off The synchronization to a rotating drive is de-activated. Factory setting.
1 -
On
An attempt is made to synchronize to the drive in positive direction (clock-
wise field of rotation) and in negative direction (anticlockwise field of rota-
tion).
During operation of a synchronous motor (Configuration 30 = 610), the
flux direction is determined additionally when the drive is at a standstill.
2 -
On, according to
reference
The search direction is defined by the sign of the reference value. If a posi-
tive reference value (clockwise field of rotation) is entered, the search is in
a positive direction (clockwise field of rotation), with a negative reference
value, the search is in a negative direction (anti
-c
lockwise field of rotation).
During operation of a synchronous motor (Configuration 30 = 610), the
flux direction is determined additionally when the drive is at a standstill.
3 -
On, clockwise
only
Synchronization to the drive is only done in positive direction (clockwise
field of rotation).
During operation of a synchronous motor (Configuration 30 = 610), the
flux direction is determined additionally when the drive is at a standstill.
4 -
On, anticlockwise
only
Synchronization to the drive is only done in negative direction (anticlock-
wise field of rotation).
During operation of a synchronous motor (Configuration 30 = 610), the
flux direction is determined additionally when the drive is at a standstill.
20 -
Determine flux
direction only
For a synchronous motor (Configuration 30 = 610), only the flux direction
is determined. The drive must be at a standstill. Synchronization to a turn-
ing drive is not possible. This method is faster than operation modes 1 ... 4.
30 -
Operation above
frequency limit
For a synchronous motor (Configuration 30 = 610), only the Flying Start is
performed. The search is continued until a rotary frequency is detected
which is greater than the
Frequency limit 624. If the stator frequency
drops below the frequency limit, the search run is continued. This operation
mode can be used for synchronous motors in torque-controlled drives. An
example application is the operation in wind energy converters.
For an asynchronous motor (Configuration 30 = 410): Wait for speed.
Applicable for torque-controlled drives which have to supply only reaction
torque without active acceleration. If the drive is externally accelerated to
the speed which is sufficient for sensor-less field-orientated control, switch-
over to torque control is carried out.
Operation modes 2, 3 and 4 define a direction of rotation for the Flying Start and avoid a deviating
direction. The Flying Start can accelerate drives by checking the rotary frequency if the drives have a
low moment of inertia and/or a small load moment.
In operation modes 1 to 4, it cannot be ruled out that a wrong direction of rotation is determined. For
example, a frequency not equal to zero may be determined although the drive is at a standstill. If
there is no overcurrent, the drive is accelerated accordingly. The direction of rotation is defined in
operation modes 2, 3 and 4.
The Flying Start function is designed for the operation of motors without brake. Brake
motors may not be operated optimum in individual cases (depending of parameteriza-
tion and brake control) with the Flying start function.
130
Operating Instructions
Agile
06/2013 Operational Behavior

 Loading...
Loading...







