Filter type
When using a real master encoder, encoder signals may be subject to noise. P1340
[0] - MPRO_ECAM_CamMaster_SpeedFilTyp can be used to select a filter type in
order to smooth the signals.
l OFF (0) = No filter
l PT1 (1) = PT1 filter
l AVG (2) = Average filter
Filter time
If P1340[0] is used to enable a filter, P1327[0] - MPRO_ECAM_CamMaster_
SpeedTFil can be used to define the corresponding filter time.
Speed factor
The master encoder can be assigned an additional speed factor P1328[0] - MPRO_
ECAM_CamMaster_SpeedFactor.
Inc/rev master encoder position resolution
If you are using a higher-level controller (P1319[0] = PARA (2)), you will need to set
the number of increments per motor revolution in P250[0] - MPRO_ECAM_
ParaMaster_Amplitude.
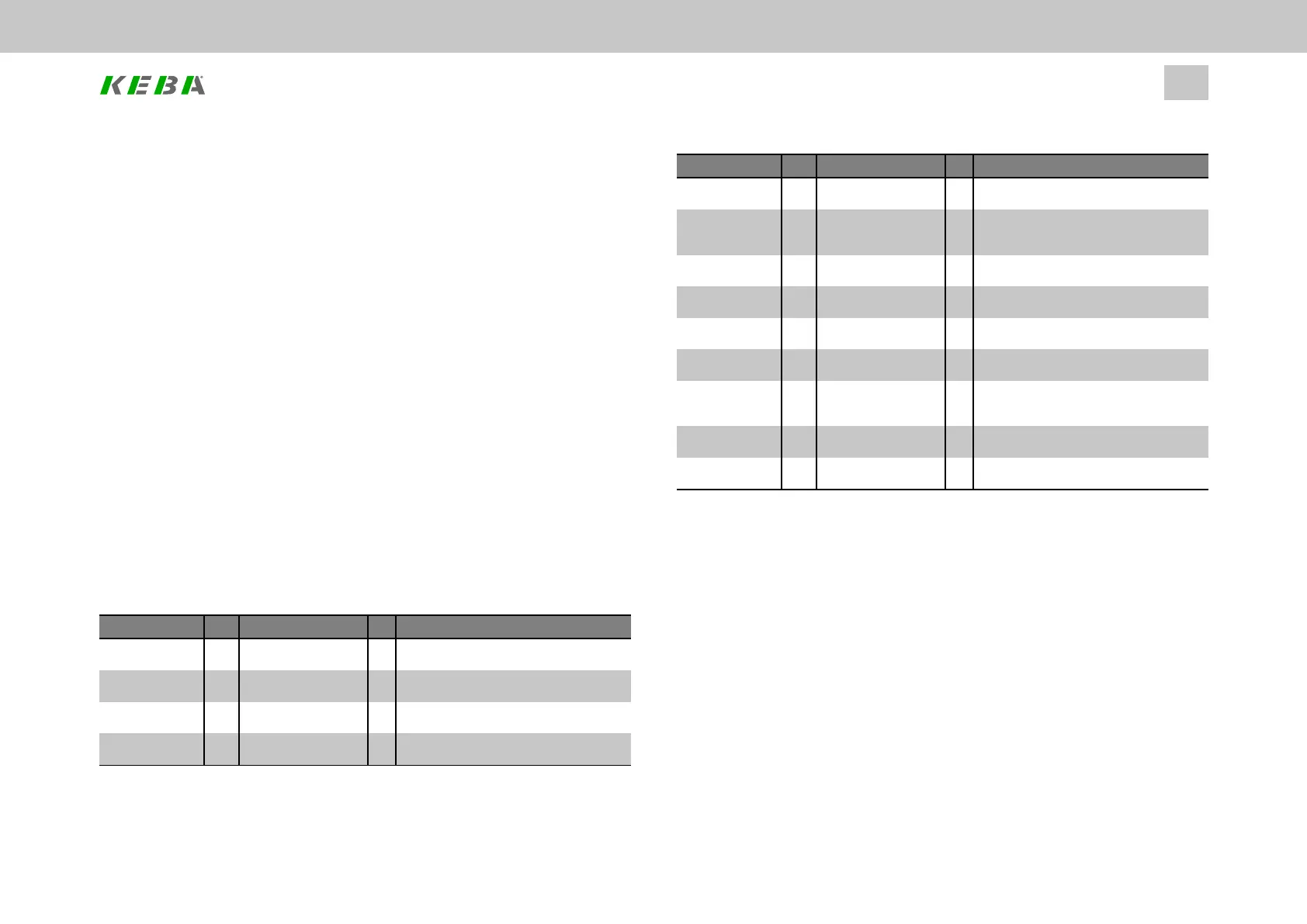
ID Index Name Unit Description
247 0 MPRO_ECAM_
ParaMaster_ActPos
incr ECAM/EGEAR:Parameterinterfacemaster
position
248 0 MPRO_ECAM_
ParaMaster_ActSpeed
rpm ECAM/EGEAR:Parameterinterfacemaster
speed
249 0 MPRO_ECAM_
ParaMaster_ActAcc
rpm
/s
ECAM/EGEAR:Parameterinterfacemaster
acceleration
250 0 MPRO_ECAM_
ParaMaster_Amplitude
ECAM/EGEAR:Parameterinterfacemaster
amplitude
Table 8.37: “Synchronized motion - Master configuration” parameters
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
285
8 Motion profile
ID Index Name Unit Description
1319 0 MPRO_ECAM_
CamMaster_AxisType
ECAM/EGEAR:Channelselectionofinternal
masterinput
1320 0 MPRO_ECAM_
CamMaster_
RevLockMode
ECAM/EGEAR:Reverselockmodeofmaster
drive
1321 0 MPRO_ECAM_
CamMaster_Amplitude
incr ECAM/EGEAR:Amplitudeoftheinternal
master
1322 0 MPRO_ECAM_
CamMaster_GearNum
ECAM/EGEAR:Gearnumeratorofthemaster
drive
1323 0 MPRO_ECAM_
CamMaster_GearDen
ECAM/EGEAR:Denominatorofthemaster
drive
1327 0 MPRO_ECAM_
CamMaster_SpeedTFil
ms ECAM/EGEAR:Filtertimeconstantofmaster
speed
1328 0 MPRO_ECAM_
CamMaster_
SpeedFactor
ECAM/EGEAR:Speedfactoroftheinternal
master
1340 0 MPRO_ECAM_
CamMaster_SpeedFilTyp
ECAM/EGEAR:Filtertypeofmasterspeed
1341 0 MPRO_ECAM_
CamMaster_Offset
incr ECAM/EGEAR:Masterdriveoffset
Table 8.37: “Synchronized motion - Master configuration” parameters (continue)