Variant 1: Motor calculation
l Enterthemotordata
Themotordatarelevanttothecalculationmustbeenteredmanuallyfromthe
datasheet.
l Clickon“Startcalculation”.
l IfthemomentofinertiaofthemotorP 461 - Mot_Jisnotknown,avalue
roughlycorrespondingtothemotor'smomentofinertiamustbeapplied.
l ThecalculationprocesscanbemonitoredintheKeStudioDriveManager5
viathemenu,View,Messages.
l Calculationofoperatingpoint:FluxP 462 - MOT_FLUXNom
l Calculationof:current,speedandpositioncontrolparameters
NOTE
l Allexistingmotorparametersareoverwritten.
Calculated values
l Fluxsettings(includingfortorqueconstant)
l Controlsettingsforcurrentcontroller:thecurrentcontrollerisdimensioned
basedontheactualswitchingfrequencyset.
l Speedcontrollerandpositioncontrollergain:hereamoderatelystiff
mechanismandmassinertiamatchingfromloadtomotorwitharatioof1:1is
tobeassumed.
l V/Fcharacteristic
NOTE
l Allexistingcontrolparametersareoverwritten.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
34
5 Motor
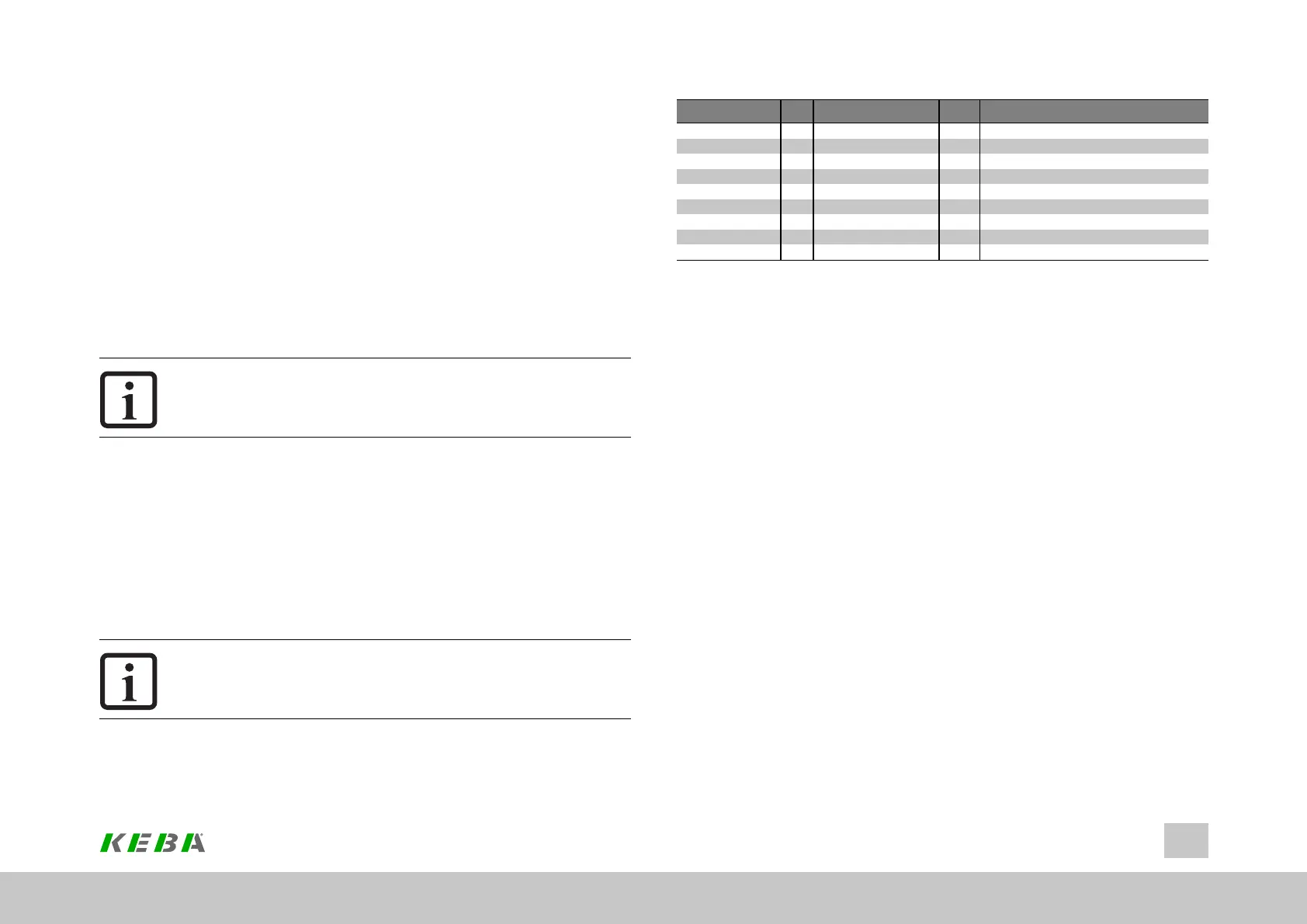
ID Index Name Unit Description
451 0 MOT_Name Nameofmotorparameterset
455 0 MOT_FNom Hz Motorratedfrequency
456 0 MOT_VNom V Motorratedvoltage
457 0 MOT_CNom A Motorratedcurrent
458 0 MOT_SNom rpm Motorratedspeed
459 0 MOT_PNom kW Motorratedpower
460 0 MOT_TNom Nm Motorratedtorque
461 0 MOT_J kgm*m Motorinertia
1530 0 SCD_SetMotorControl Determinationofdefaultcontrolsettings
Table 5.1: “Synchronous motor” parameters