6.3 Optimizing the axis jerk
6.3.1
Checking the axis jerk
Jerk limitation
The jerk-limited acceleration is optimized in the next step: The jerk is used to smooth the
acceleration and response behavior by applying a time for changing the acceleration.
The jerk is defined in units/s
3
, i.e. acceleration [units/s
2
] / time [s].
The
time
during
which the acceleration change occurs is defined as: t [s] = acceleration [units/
s
2
] / jerk [units/s
3
].
Axes do not need to have the same jerk value. The result of a jerk limited acceleration is
rounded corners at the acceleration-phase start and end of the velocity profile and smoothed
movements.
● Jerk limitation is active when "SOFT" is programmed.
● Jerk limitation is deactive when "BRISK" is programmed.
Machine data for jerk
It is recommended that the MD20150[20] = 2 default setting, i.e. "SOFT", is used.
● MD20150[20] = 1 then "BRISK" is active in the switch-on state (acceleration without jerk
limitation).
● MD20150[20] = 2 then "SOFT" is active the switch-on state (acceleration with jerk limitation).
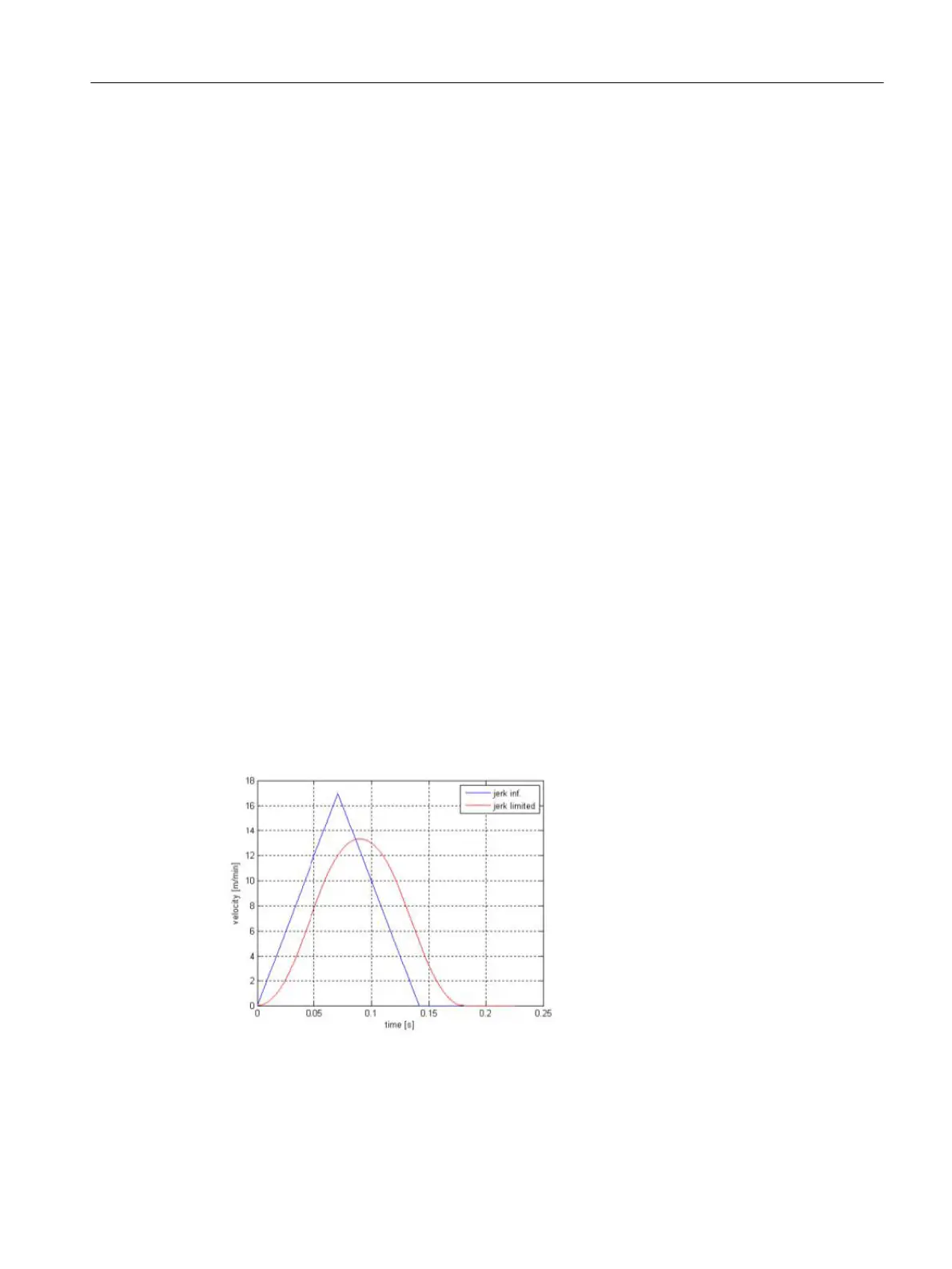
Example:
blue Acceleration without jerk limitation
red Acceleration with jerk limitation
Tuning
6.3 Optimizing the axis jerk
CNC commissioning
Commissioning Manual, 10/2015, 6FC5397-3DP40-5BA3 183

 Loading...
Loading...














