Chapter 5 List of Parameters 5.3 Axis-Specic Parameters
181
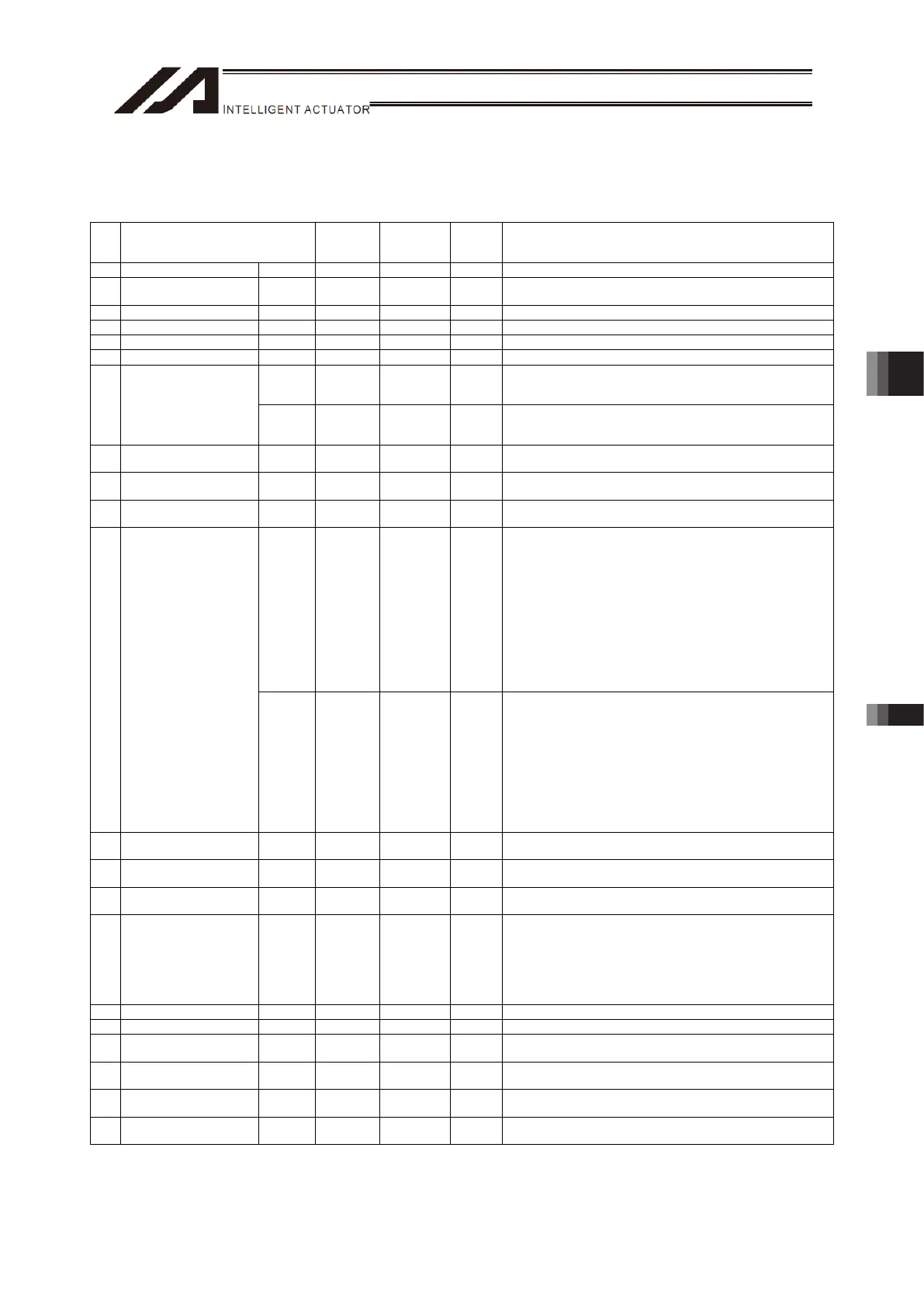
5.3 Axis-Specific Parameters
* It is described as “In Common” when the statement of a parameter should be the same for the pulse
motor type and AC servo motor type.
No. Parameter name
Default
value
(Reference)
Input range Unit Remarks
~
1 Axis operation type Common 0 0 ~ 1
0: Linear movement axis
1: Rotational movement axis (Angle control)
2 (For extension) Common 0 ~
3 (For extension) Common 0 ~
4 (For extension) Common 0 ~
5 (For extension) Common 0 ~
Pulse
Motor
Type
1 0 ~ 1
0: Motor CCW → Negative direction on the coordinate system
1: Motor CCW → Positive direction on the coordinate system
6
Coordinate/physical-oper
ation direction selection
AC Servo
Motor
Type
1 0 ~ 1
0: Motor CCW → Positive direction on the coordinate system
1: Motor CCW → Negative direction on the coordinate system
7 Soft limit + Common 50000
-99999999 ~
99999999
0.001
mm
Fixed to 359.999 degrees internally in the index mode. Invalid in
the infinite-stroke mode.
8 Soft limit – Common 0
-99999999 ~
99999999
0.001
mm
Fixed to 0 degree internally in the index mode. Invalid in the
infinite-stroke mode.
9
Soft-limit actual position
margin
Common 2000 0 ~ 9999
0.001
mm
Actual position margin in the positioning boundary critical zone in
the infinite-stroke mode
Pulse
Motor
Type
0 0 ~ 5
0: Search phase Z after end search
(Offset operation after end search for actuator without
Z-phase)
1: Current position 0 home
(This parameter can be specified only with an incremental
encoder. Pay attention to contact.),
2: Current position = Preset home (This parameter can be
specified only with an incremental encoder. Pay attention to
contact.)
3: System reservation
4: Home position sensor detection range center point calculation
method
(Main application Ver. 1.06 or later)
10 Home-return method
AC Servo
Motor
Type
0 0 ~ 5
0: Search phase Z after end search
(Offset operation after end search for actuator without
Z-phase)
1: Current position 0 home
(This parameter can be specified only with an incremental
encoder. Pay attention to contact.),
2: Current position = Preset home (This parameter can be
specified only with an incremental encoder. Pay attention to
contact.)
3: System reservation
4: System reservation
11
Home-return end-search
direction selection
Common 0 0 ~ 1
0: Negative end of the coordinate system
1: Positive end of the coordinate system
12 Home preset value Common 0
-99999999 ~
99999999
0.001
mm
13
SIO/PIO home-return
order
Common 0 0 ~ 16 Executed from the smallest one.
14
Home-sensor input
polarity
Common 0 0 ~ 4
0: Do not use
1: Contact a (End detection sensor (End equivalent))
2: Contact b (End detection sensor (End equivalent))
3: Contact a (Home check sensor (Mechanical end vicinity
check))
4: Contact b (Home check sensor (Mechanical end vicinity
check))
15 System reservation Common 0 0 ~ 2
16 System reservation Common 0 0 ~ 2
17 System reservation Common 10 1 ~ 100
mm/se
c
18 System reservation Common 100 1 ~ 500
mm/se
c
19
End search speed at
home return
Common 20 1 ~ 100
mm/se
c
20
Phase-Z search speed at
home return
Common 3 1 ~ 50
mm/se
c
Exercise caution, since limitations apply depending on the
read/encoder pulse count.

 Loading...
Loading...