Chapter 7 Appendix 7.1 Work and Tool Coordinate System Features for Linear Axis
253
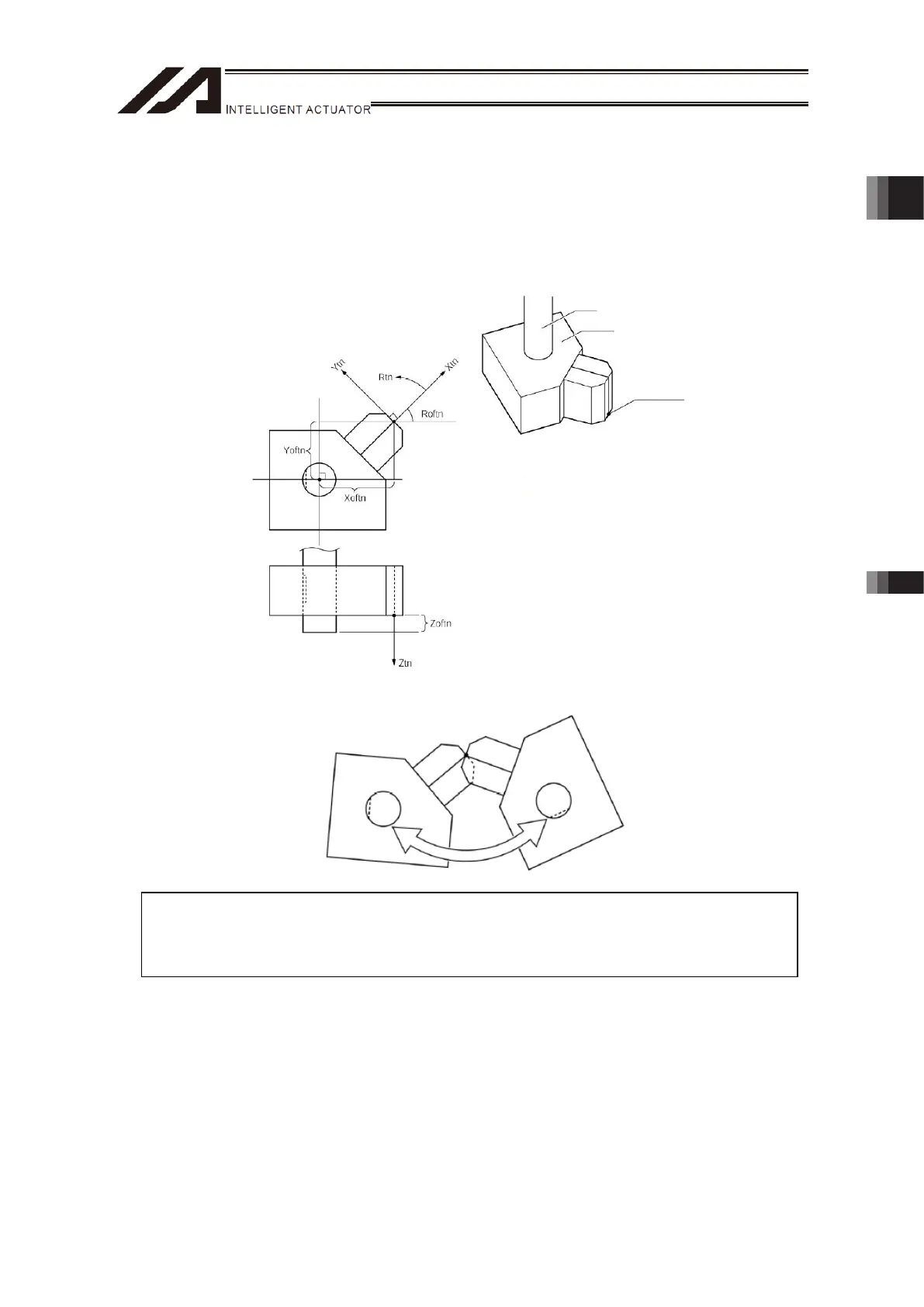
[4] Tool Coordinate System
It is the 128 kinds of coordinate systems defined by the too (such as hand) dimensions (offset) of
that attached on the tool attached position. Work Coordinate System No. 0 is reserved as offset = 0
of Tool Coordinates by the system.
Select the defined tool coordinate system number, and it is used as the destination point at
positioning of the tool tip as well as the tool attached position.
Select the defined Tool Coordinate System and operate the R axis with JOG operation, and such
movement as shown in the figure below can be performed.
Regarding directions of X and Y axes (Xtn and Ytn) in tool coordinate system
With R-Axis : Varies relying on coordinates of R-axis
Without R-Axis : Always fixed, the directions depends on R offset of tool coordinate
system
R-axis
Tool
Tool Tip
Xoftn : X Tool Coordinate offset
Yoftn : X Tool Coordinate offset
Zoftn : X Tool Coordinate offset
Roftn : X Tool Coordinate offset
Xtn : Tool Coordinate X-axis
Ytn : Tool Coordinate X-axis
Ztn : Tool Coordinate X-axis
Rtn : Tool Coordinate X-axis
(n is coordinate system number)

 Loading...
Loading...