In a real environment there are external and internal disturbances that can affect the
system’s performance. In addition, the physical nature of the closed loop system can cause it
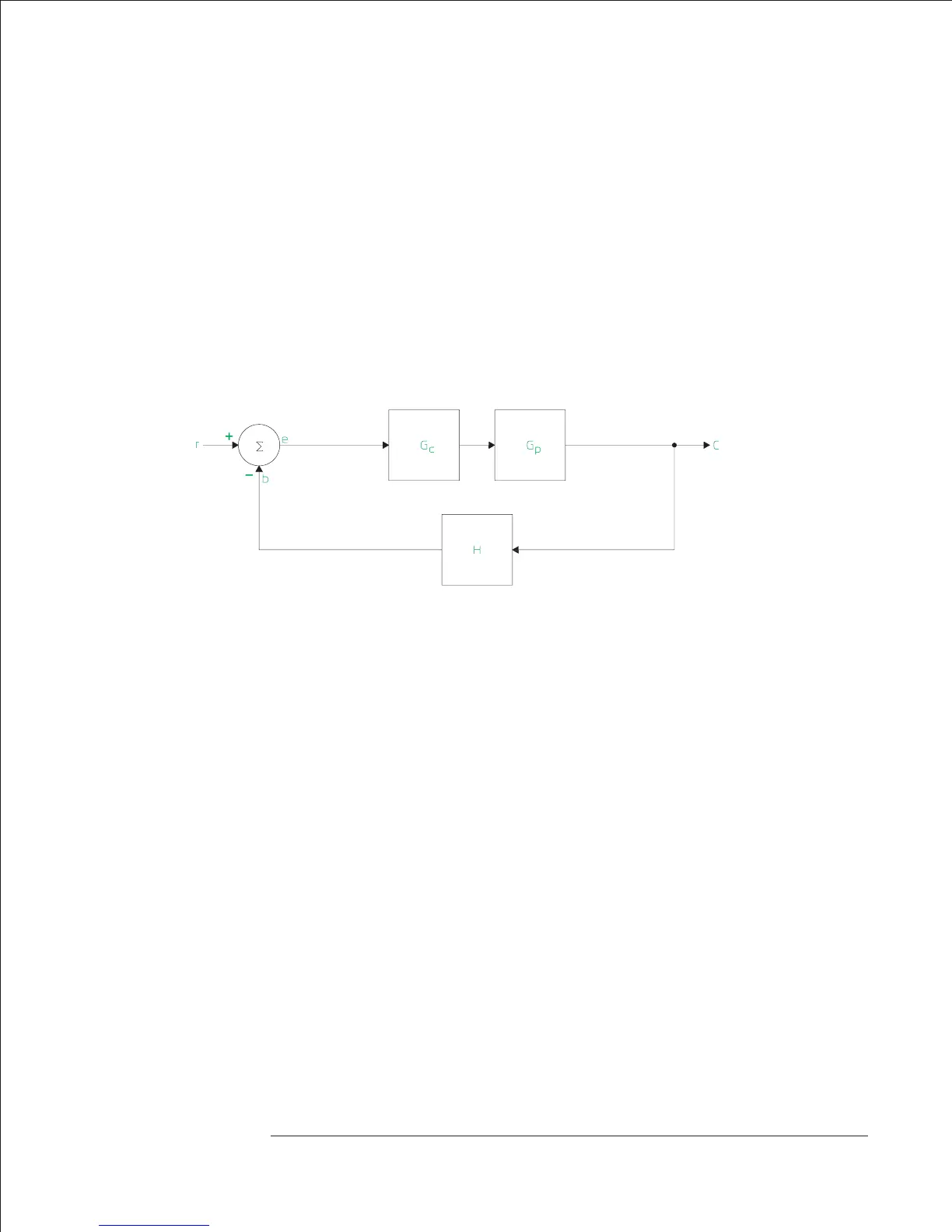
to be unstable or lack required performance. Compensation is added to either the
feed-forward or feedback loop to improve performance and to ensure acceptable stability
margins. Figure 5-2 shows a feed-forward compensation block with a transfer function G
c
,
and a feedback compensation block with transfer function H. Many variations are possible.
• The control loop may be composed of mechanical devices and/or analog or digital
electrical elements.
• The compensation may be missing in which case G
c
and H = 1.
• The compensation may be combined with other elements. Examples of this are
discussed in the next section.
Figure 5-2
Compensation Added to Forward Path
Closed-loop systems as shown in figure 5-1 can be expressed as
C/R=G /(1=GH)
Solvingfortheopenlooptransferfunction(b/e)
b = (r-b) GH
e=r-eGH
b/r = GH/(1+GH) e/r = 1/(1=GH)
The open loop transfer function is
b/e = GH
Where:
G = GcGp
Gc is the transfer function of the compensation network
Gp is the transfer function of the “plant” or process
H is the transfer function of the feedback network
Agilent 35670A
Operator's Guide Measuring Control Systems
5-3
 Loading...
Loading...