Chapter 7 Appendix 7.1 Work and Tool Coordinate System Features for Linear Axis
251
(2) Positioning on Work Coordinate System
Select the work coordinate system to be used and perform positioning.
When selecting the work coordinate system number in SEL program, use SLWK Command.
Also, the selected work coordinate system number is valid after program complete and after
rebooting.
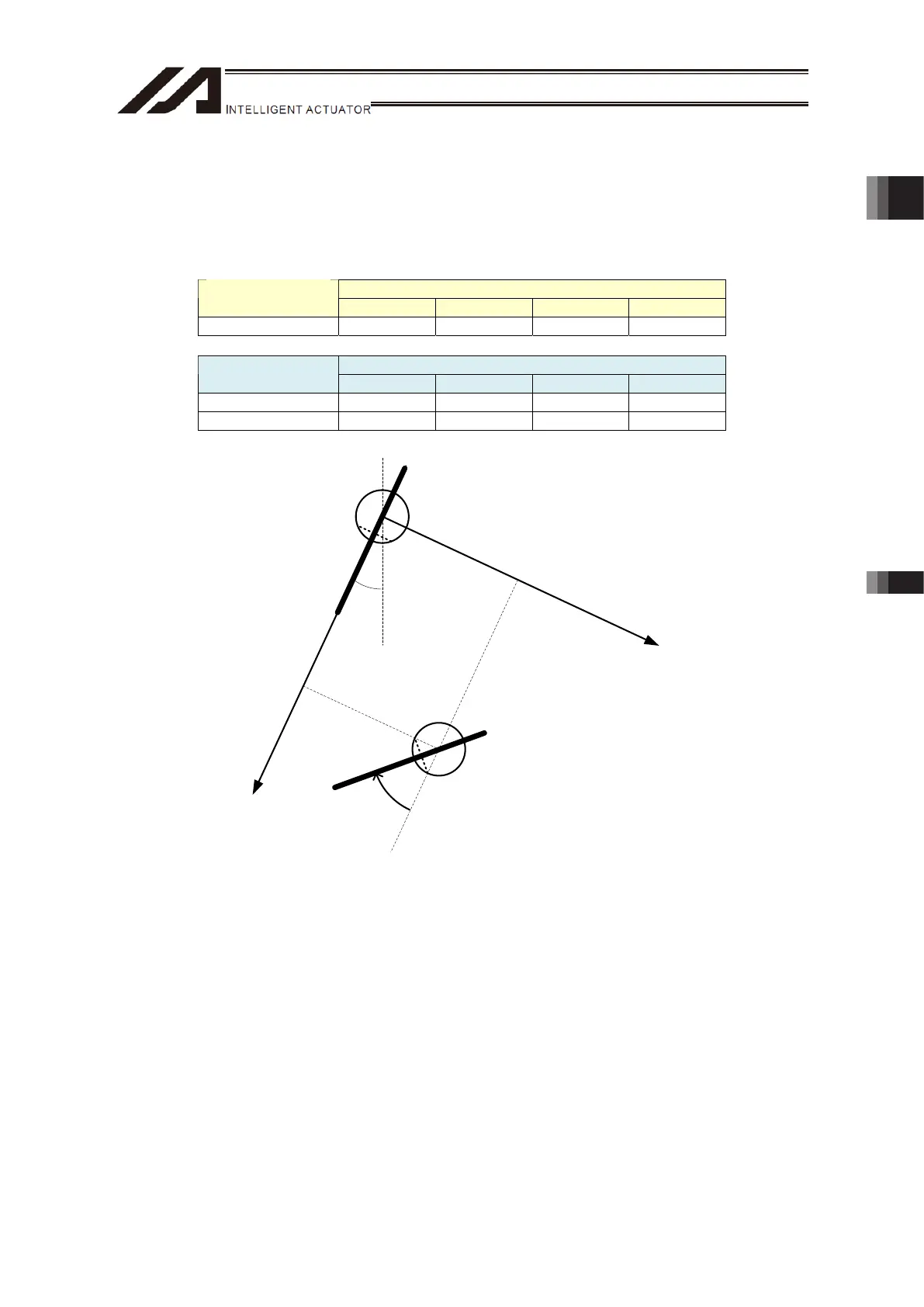
1) When having PTP positioning to Position No. 5 and No. 6 on Work Coordinate System No. 1.
Offset Work Coordinate
System No.
X [mm] Y [mm] Z [mm] R [deg]
1 200.000 120.000 0.000 -25.000
Coordinate Data
Position No.
Axis1(X) Axis2(Y) Axis3(Z) Axis4(R)
5 0.000 0.000 0.000 0.000
6 50.000 40.000 0.000 -45.000
Xw1
Yw1
50
40
-45°
-25°
(* Example for when the datum surface on the R-axis orients Xb positive direction when each
axis system coordinate on all the unit axes = 0)

 Loading...
Loading...