PG feedback parameter group 09
PARAMETER DESCRIPTION 195
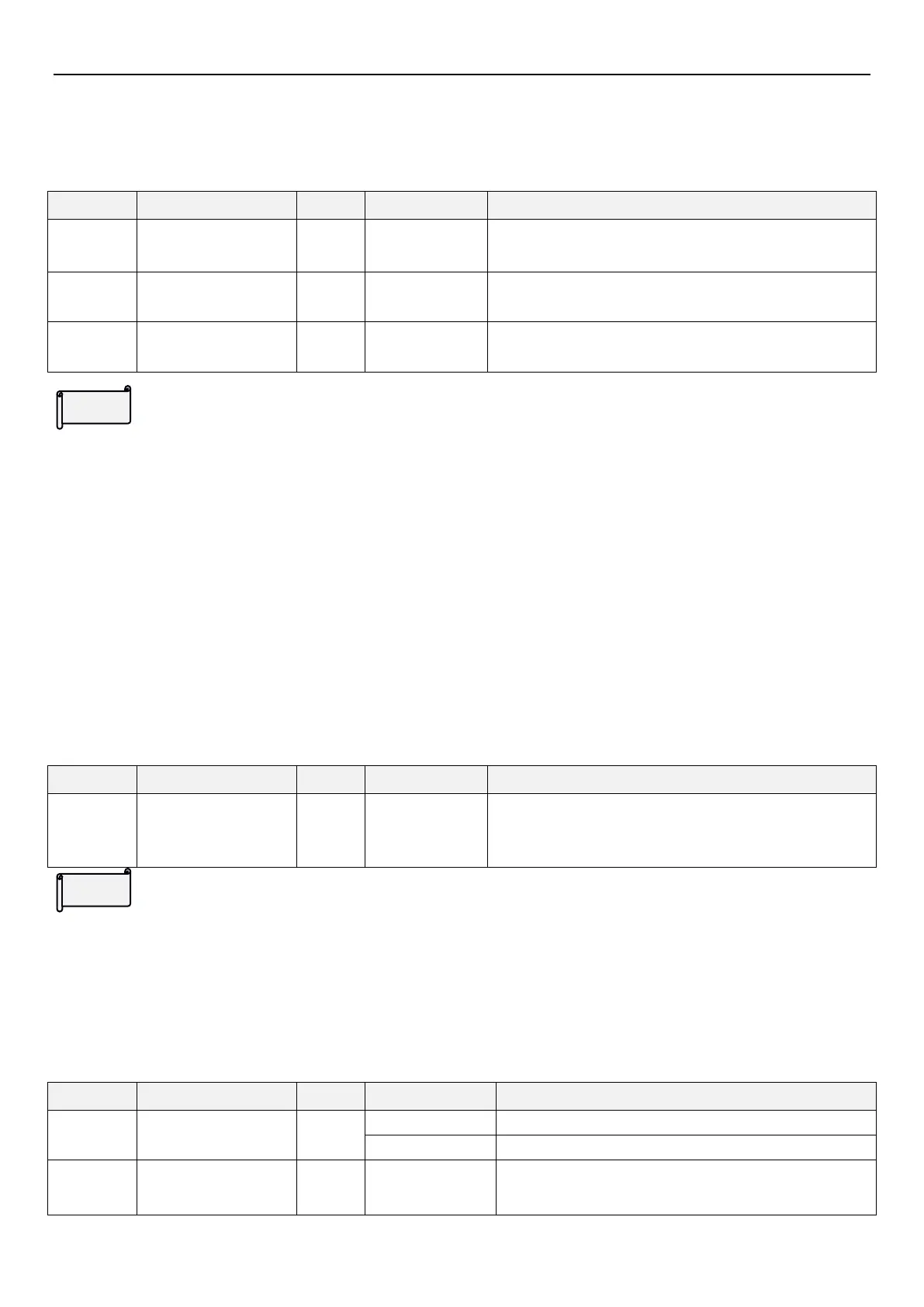
5.9.4 PID filter setting
Filter can reduce interference in system, but will reduce response performance.
PID target signal filter
time
Set PID target signal low-pass filter time constant
PID feedback signal
filter time
Set PID feedback signal low-pass filter time constant
PIDoutput signal filter
time
Set PID output signal low-pass filter time constant
PID filter time constant
08-24
(P.711)
is used to set PID target signal filter time constant,
which can
reduce the impact caused by PID
target signal sudden change in the system.
08-25
(P.712)
is used to set PID feedback signal filter time constant, which can reduce interference in feedback
signal, but will lower system response.
08-26
(P.713)
is used to set PID output signal filter time constant, which can reduce sudden change of PID output
frequency effectively,
but will lower system response.
5.9.5 PID deviation control limit
If deviation between PID target and PID feedback is smaller than 08-27 value, PID won’t change output frequency.
PID deviation control
limit
If deviation between PID target and PID feedback is smaller
than 08-27(P.714) value, PID won’t change output
frequency.
PID deviation limit
08-27(P.714) is used to set PID deviation control limit. When deviation between target and feedback is less than 08-27(P.714),
PID will stop adjusting output frequency, so when deviation is relatively small, output frequency will remain unchanged, which is
very effective for some closed-loop system.
5.9.6 PID integral property
PID integral separation function can effectively reduce overshoot..
Integral separated
property
Set the deviation between target and feedback when
integral separate function works.
 Loading...
Loading...


